



Эффективность производственных процессов (ПП) в рамках лесопромышленных предприятий может быть обеспечена путем сокращения совокупных затрат средств, энергии и времени на их осуществление, потерь ресурсов и других составляющих. Обеспечить повышение результативности ПП возможно только путем их выполнения в автоматическом или автоматизированном режимах. К автоматизации ПП относится и регулирование информационными потоками, включающее управляющие действия от сбора данных и учета ресурсных и материальных потоков. Кроме того, автоматизация управления исполнительными механизмами и агрегатами позволит обеспечить прецизионность их действий и точное соответствие разработанной технологической карте.
Принятие стратегически важных решений обоснования выбора технологии и техники требует полноты и точности информации о лесных участках и произрастающих на них древесных ресурсах. Эффективным инструментом, обеспечивающим оперативность и результативность управления деятельностью лесопромышленных предприятий, являются автоматизированные геоинформационные системы (ГИС). Геоинформационные технологии позволяют создать единое оптимально организованное информационное пространство предприятия, дают возможность производить эффективный обмен информацией между его подразделениями, оперативно интегрировать внешнюю информацию в целях научного обоснования практических действий. Одним из эффективных методов и технологий дистанционного получения информации в решении задач мониторинга лесов, изучения и измерения параметров лесного покрова является лазерное зондирование [3]. Применение высокоточных систем глобального спутникового позиционирования, бортовой лазерной и цифровой видеосъемки характеристик земной поверхности и лесной растительности позволяют дистанционно измерять геометрические параметры наземных объектов с сантиметровой точностью [9]. Разработка и реализация подобной системы предопределяет моделирование ее компонентов и их взаимосвязей.
Созданию моделей сложных природно-технических систем посвящено большое количество общедисциплинарных и прикладных исследований [1, 6, 8]. Однако при очевидных успехах обобщенного (абстрагированного) классического моделирования, использование математического аппарата и компьютерной техники для прикладных целей исследования часто оказывается малоэффективным. Здесь многообразие и сложность протекающих в природно-технических системах взаимосвязанных процессов, недостаток фактических априорных данных о свойствах исследуемых объектов и процессов и условиях их жизненных циклов являются основными причинами неполноты полученных моделей. В результате попытки точного описания приводят к чрезвычайно сложным для анализа математическим моделям, а недостаток данных не позволяет осуществлять адекватные реальным процессам вычислительные эксперименты. При этом принципиальная неполнота знаний об объектах и процессах промышленного лесопользования также существенно ограничивает применимость классических аналитических моделей и дополнительно нуждается в формализованных эвристиках и знаниях экспертов для непосредственного использования их в программно-реализуемой среде моделирования.
Одним из эффективных подходов к построению информационной модели сложных природно-технических систем является алгоритмическое моделирование, построенное на интеграции классических имитационных моделей и экспертной подсистемы с пространственными цифровыми моделями (ЦМ) рельефа и лесных ресурсов [4]. Тогда под алгоритмической совокупностью моделей понимаются такие, в которых основные управляющие блоки (критерии и (или) ограничения) описываются математическими конструкциями, включающими логические условия, приводящие к разветвлению вычислительного процесса и управляемому обращению к исходным данным и расчетным блокам, имитирующим поведение элементов изучаемых объектов и взаимодействий между ними в процессе функционирования.
Основное содержание метода моделирования ПП промышленного лесопользования (ПЛ) (см. рис.1) и его алгоритмические особенности раскрываются в следующем:
1. Осуществляется сбор и подготовка исходных данных, их анализ и синхронизация:
1.1. Предварительная информация о лесных ресурсах и производственных условиях – различные схемы и карты, таблицы.
1.2. Для актуализации предварительных данных используются методы дистанционного зондирования земли (ДЗЗ), в частности а) спектральные снимки из космоса; б) облако данных лазерного сканирования (LiDAR) структуры и параметров леса и подстилающей земной поверхности лесных участков.
1.3. Наполнение подсистемы экспертных подсказок и оценок.
2. На базе геоинформационных технологий и системы осуществляется моделирование ЦМ рельефа (ЦМР). Здесь раскроем содержание и математический аппарат формирования ЦМР в информационных системах из космических снимков и имеющихся карт различного назначения. Первоначально получают светотеневое изображение рельефа, в общем случае описываемое совокупностью точек превышения ![]() . Подобные изображения часто называют условным термином «2,5-мерные изображения», и полученные модели недостаточно информативны. Для построения полновесного трехмерного изображения рельефа обычно используется локальная интерполяция NURBS (неоднородный рациональный фундаментальный сплайн) кривыми [7]. Рациональная параметрическая кривая на основе B-сплайнов Ni,m(t), построенная по вершинам pi (I=1,2… n; n ³ m) с весами wi , может быть описана в каждой своей точке с помощью радиус-вектора [5].
. Подобные изображения часто называют условным термином «2,5-мерные изображения», и полученные модели недостаточно информативны. Для построения полновесного трехмерного изображения рельефа обычно используется локальная интерполяция NURBS (неоднородный рациональный фундаментальный сплайн) кривыми [7]. Рациональная параметрическая кривая на основе B-сплайнов Ni,m(t), построенная по вершинам pi (I=1,2… n; n ³ m) с весами wi , может быть описана в каждой своей точке с помощью радиус-вектора [5].
 , где
, где ![]() (1)
(1)
3. Далее в ЦМР встраиваются следующие тематические слои:
3.1. Определенные по спектру области: непокрытые лесом, гари, ветровалы и др.; покрытые лесом земли распределяются на области: а) по породам (хвойные, лиственничники и лиственные), в них выделяются б) аномальные (больные насаждения) и др. зоны.
3.2. Осуществляется по (п.1.2.б) пространственное моделирование k-го дерева:
3.2.1. Расположения центров стволов ![]() .
.
3.2.2. Имея высоту Hk, диаметр кроны Dкрk k-го дерева и по (п.3.1.а) с помощью а) внешних известных эмпирических зависимостей и б) экспертов (экспертная подсистема) определяются (прогнозируются) возраст Тk и основные геометрические характеристики: диаметр ствола Dстk, его сбежистость Сk и др.
3.2.3. Определяются деревья для использования в навигационных целях (реперов) Sрепl , где l ≤ k.
3.3. Накладывается поквартальная и повыдельная сеть.
3.4. Проводится подготовка документов для работ по отводу лесосечного фонда на местности.
4. Осуществляется оценка отведенного лесосечного фонда.
4.1. Определение и/или утверждение лицом, принимающим решение (ЛПР) на основании расчетов и подсказок экспертной подсистемы:
4.1.1. Уровня технологического воздействия на лесную среду (доли выборки деревьев и сохранения подроста).
4.1.2. Конкретного перечня деревьев Sрубj , где j ≤ k, подлежащих рубке согласно нормам права и запросу потребителей.
4.1.3. Прогнозная оценка потенциального выхода z – го сортимента Sрубjz = f (Sрубj, Hk, Dстk, Сk).
4.2. Формируется модель идеального потока масс Ʃ Sрубjz. Согласно физической интерпретации процесс потока масс может быть отнесен к процессам градиентного переноса, которые подчиняются уравнению [2]:
 (2),
(2),
где ![]() - переносимая величина,
- переносимая величина, ![]() - коэффициент переноса
- коэффициент переноса ![]() в данной точке пространства.
в данной точке пространства.
5. Осуществляется анализ и формализация технологических процессов (ТП) и схем ПЛ.
5.1. Оцениваются потенциальные технологические схемы для разработки лесосеки согласно п.4.1.1. и 4.1.2.
5.2. Генерируется перечень потенциально возможных технологических цепочек элементов φp процессов ПЛ на данном участке, согласно п.4, п.5.1.
5.3. Синтезируются банк масок ТП в разрезе изменения суммы масс Sрубjz.
5.4. Формализуются совокупности элементов φp ТП ПЛ.
6. Выполняется анализ потенциальных агрегатов ПЛ.
6.1. Оценивается возможность применения агрегатов ПЛ в ТП, согласно п.5. и условий п.4.
6.2. Производится формальное описание агрегатов ПЛ.
7. Анализируются и формализуются технические решения устройств и механизмов φpij, обеспечивающих исполнение φpi процесса ПЛ.
8. Формируется граф морфологического дерева, побинарно связывающий каждое p–е изменение состояний Sрубj с элементом φpi процесса ПЛ и исполнительным механизмом φpij агрегата.
9. Осуществляется поиск оптимального потока масс Ѱопт= f (Ʃ Sрубjz ) и соответствующего диапазона вариантов путей Ṝ=f(Ѱопт) следования лесозаготовительного агрегата и варианты технологических стоянок Тстi, обеспечивающих однозначную досягаемость к группе Sрубj каждой i-й стоянки.
10. Производится процесс поиска эффективного пути следования лесозаготовительного агрегата Ṝ =f(r(t), Sk, Sрепl, Sрубj, Sрубjz, Ṝ, Ѱопт) и мест и его технологических стоянок Тстj, где j ≤ i.
11. Определяется оптимальный путь следования транспортного агрегата.
12. Производится выбор оптимального транспортного агрегата.
13. Генерируется программы PСАУ=f(r(t), Sk, Sрепl, Sрубj, Sрубjz, Ṝ, Ѱопт) систем автоматического управления (САУ) соответственно лесозаготовительных PСАУл и транспортных PСАУт агрегатов. При решении задачи управления агрегатами выходом является набор векторов движения Vi для каждого i-го устройства или механизма j-го агрегата, при этом модуль вектора максимален, а направление вычисляется как нормированная векторная сумма Vij = Vпов + Vпер, где Vпов - нормированный вектор поворота, Vпер - нормированный вектор перемещения.
14. Генерируется подпрограммы маркировки Pрм и учета Pру перемещений Sрубjz для PСАУл и PСАУт агрегатов.
15. Производится компьютерный эксперимент тестирования программы PСАУ на адекватность соответствий откликов обратной связи агрегатов при функционировании в реальных условиях по модельным данным виртуальной среды и управляющей PСАУ. Оформляются протоколы выполненных процессов и достигнутых результатов.
Для формализации процессов был использован метод системно-когнитивного анализа и синтеза, где изначально предполагалось единство объектов исследования как некой условно неразделимой системы, включающей ПП, лесные агрегаты и условия их применения. Все происходящие на лесном участке процессы в той или иной степени связаны с изменением предмета труда, в нашем случае непосредственно дерева от его зарождения и роста до преобразования в продукцию в промышленных масштабах [4]. Таким образом, совокупность процессов может быть представлена в виде некоторых цепочек изменений ПТ. Здесь звенья – элементы ППЛ, будут отражать непосредственное состояние ПТ, а переход от одного состояния ПТ к другому будет элементом процесса, который может быть реализован некоторым множеством способов, каждый из которых в свою очередь может быть осуществлен рядом технических устройств, обладающих некоторым спектром параметров [8].
Инженерный результат и целесообразность применения предложенного в работе метода моделирования и управления ППЛ состоят:
- в использовании сбалансированной системы, обеспечивающей оценку эффективности лесопромышленного производства в целом всего комплекса мероприятий;
- в применении трехмерного математико-картографического моделирования реальных лесных ресурсов в реальном времени с необходимой детализацией рельефа, предметов труда (ПТ) поэлементно и фитоценоза (лесных древесных ресурсов в целом) для обеспечения эффективного управления процессами промышленного лесопользования;
- в определении, для заданного уровня оптимального уровня воздействия на лесную среду, эффективности лесопромышленных процессов, включающих:
- единичную технологическую цепочку;
- исключительного адресного списка деревьев, подлежащих выборке;
- единичную схему путей перемещения лесных агрегатов (технологических стоянок, разворотов, мест временного хранения и резервирования ПТ, и т.п.);
- адресную маркировку ПТ;
- оптимальное управление процессами лесопромышленного производства, глобальный учет потоков ПТ и контроль информационных потоков.
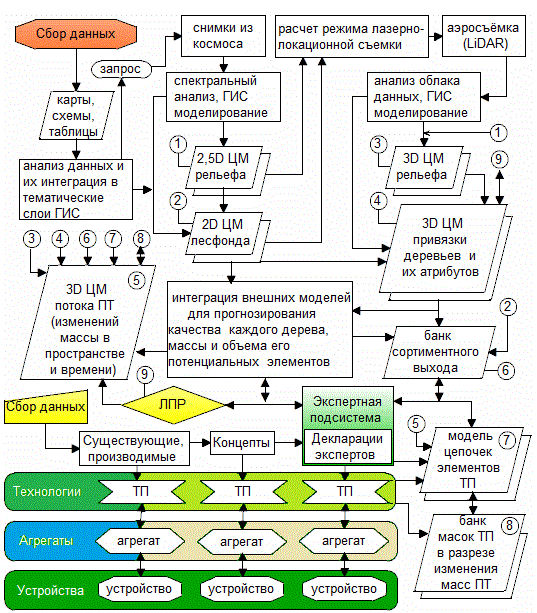
Рис.1. Блок схема формирования модели производственных процессов (ЦМ – цифровая модель, ТП – технологический процесс, ПТ – предмет труда, ЛПР – лицо, принимающее решение)
Рецензенты:
Якимович С.Б., д.т.н., профессор, заведующий кафедрой «Технологии и оборудования лесопромышленного производства», ФГБОУ ВПО Уральский государственный лесотехнический университет, г. Екатеринбург.
Ковалев А.П., д.с.-х.н., профессор, директор ФГУ «Дальневосточный научно-исследовательский институт лесного хозяйства», г. Хабаровск.
Библиографическая ссылка
Казаков Н.В., Абузов А.В. МОДЕЛИРОВАНИЕ ПРОИЗВОДСТВЕННЫХ ПРОЦЕССОВ ПРОМЫШЛЕННОГО ЛЕСОПОЛЬЗОВАНИЯ // Современные проблемы науки и образования. – 2014. – № 4. ;URL: https://science-education.ru/ru/article/view?id=14366 (дата обращения: 19.04.2024).