



В связи с этим ставится задача разработки интеллектуальной системы «умных светофоров», которая смогла бы полностью самостоятельно собирать информацию о загруженности дорог, о времени простоя машин на перекрестке, а также статистические данные о загруженности дороги в определенное время суток, в определенный день недели. На основе анализа этой информации система должна автоматически принимать решение о включении (или выключении) того или иного светофора на перекрестке.
Чтобы своевременно реагировать на постоянно меняющуюся дорожную ситуацию, автоматическая система должна иметь возможность обучения. Для этих целей наиболее подходящим вариантом решения является применение искусственной нейронной сети, имеющей возможность самообучения. Актуальность использования нейронных сетей (НС) подтверждается массой удачных применений в различных областях научных исследований.
Объект исследования
Городские перекрестки разнообразны и могут отличаться друг от друга по количеству установленных светофоров и состояний. Рассмотрим создание интеллектуальной системы управления светофорами на отдельном городском перекрестке (Рис.1).
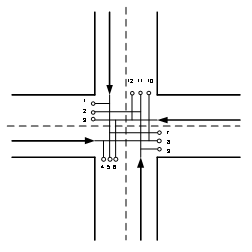
Рис.1. Пример городского перекрестка
На рисунке 1 цифрами 1,2,…,12 отмечены светофоры, стрелками - потоки машин, следующие в заданном направлении, тонкими линиями - возможности поворотов. Под светофором будем понимать устройство, посылающее световой сигнал (красный – стоим, зеленый - едем) машинам, на заданном направлении движения (полосе дороги). Предполагается, что интеллектуальная система будет посылать данному устройству сигнал о включении, или выключении (соответственно 1 или 0) , а задержка межу переключениями (желтый свет) будет рассчитываться и включаться на самом светофоре, при смене его режима.
Так как на перекрестке располагается несколько светофоров, кроме задачи увеличения пропускной способности дороги, нам предстоит решить задачу управления потоками машин, так, чтобы не создавать аварийных ситуаций.
Для этого, введем понятие состояния перекрестка. Под состоянием перекрестка будем понимать строго определенную совокупность включенных (горящих зеленым светом) и выключенных (горящих красным) светофоров. На рисунках 2 - 6 рассмотрено несколько дорожных ситуаций.
На рисунке 2 изображено состояние перекрестка (первое), при котором будут гореть зеленым светофоры 1, 2 и 3, пропуская машины влево. В это же время, не создавая аварийных ситуаций, могут гореть зеленым светофоры 4, 9 и 12.
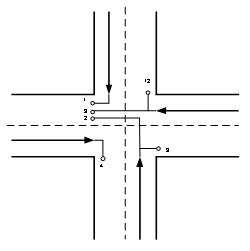
Рис. 2. Дорожная ситуация при движении транспортного потока влево с возможностью безаварийного проезда в остальных направлениях
Аналогичным образом определим все возможные состояния рассматриваемого перекрестка, обеспечивающие безаварийный проезд на нем. Для обеспечения проезда вниз (Рис.1) необходимо зажечь светофоры 4,5,6. При этом светофоры 1, 9, 12 могут быть включены и не помешают движению вниз - второе состояние.Третье состояние - для обеспечения проезда вправо (Рис.1) необходимо, чтобы были включены светофоры 7, 8, 9, светофоры 1, 4, 12 также могут быть включены. Четвертое состояние - обеспечение проезда вверх (Рис.1) - необходимо зажечь светофоры 10, 11, 12, светофоры 1, 4, 9 могут быть включены и не помешают движению вверх.
Результат исследования
Все рассмотренные возможные состояния перекрестка можно представить в виде таблицы (Табл.1), строкам которой соответствуют состояния перекрестка, а столбцам – светофоры, расположенные на перекрестке. Любой элемент таблицы равен 1, если соответствующий светофор должен быть включен в соответствующем состоянии перекрестка, и равен 0, если светофор должен быть выключен.
Таблица 1
Состояния перекрестка
|
Номер состояния перекрестка |
Номер светофор на перекрестке (соответствуют нумерации на схеме) |
|||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
|
2 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
|
3 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
|
4 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
Проектирование системы
Каждому светофору на рассматриваемом перекрестке поставим в соответствие нейрон и объединим все светофоры перекрестка в нейронную сеть.
Особенностью нейронной сети является то, что ей предстоит решать комбинированную задачу оптимизации и кластеризации, тогда как широко распространенные модели нейронных сетей предназначены для решения либо задачи оптимизации, либо задачи кластеризация. Поэтому проектируемая сеть будет состоять из двух частей. Первая часть нейронной сети будет решать задачу оптимизации, ее выходы будут являться входами для второй части сети, которая предназначена для решения задачи кластеризации.
Первым этапом построения нейросетевых моделей является отбор входных данных, влияющих на ожидаемый результат. Входными данными для проектируемой нейронной сети будет оценка дорожной ситуации на рассматриваемом и соседних перекрестках, зависящая от загруженности каждого из направлений движения в текущий момент времени, а также статистики о плотности потоков движения на перекрестке в определенное время суток, в определенный день недели[1].
В качестве выходных данных сети необходимо получить номер состояния перекрестка (соответствующий табл.1), в котором он должен находиться в следующий момент времени.
Для решения поставленной задачи будем использовать многослойную нейронную сеть[2], состоящую из трех слоев.
Входной слой. Количество нейронов этого слоя зависит от количества светофоров. Для рассматриваемого перекрестка входной слой содержит 12 нейронов. Функциями этого слоя является получение данных, усиление и распространение сигнала.
Средний слой. Основной функцией среднего слоя является нахождение решения задачи оптимизации движения транспортных средств через перекресток [1]. Количество нейронов данного слоя определяется количеством нейронов входного слоя.Входной и средний слои, а так же матрица весов между ними будут составлять первую часть всей нейронной сети. На выходах необходимо получить решение сети об уровне активности каждого светофора, т.е. решение о том, какие светофоры должны быть включены.
Выходной слой. Выходной слой является второй составляющей частью нейронной сети. На выходах этого слоя необходимо получить решение задачи классификации, эти же выходы и будут выходами всей сети в целом. Количество нейронов выходного слоя зависит от количества состояний, в которые может переключиться перекресток. Для рассматриваемого перекрестка выходной слой будет содержать 4 нейрона, значение одного из которых будет равно 1 (номер этого нейрона определит номер выбранного состояния перекрестка), а значение остальных – равно 0.
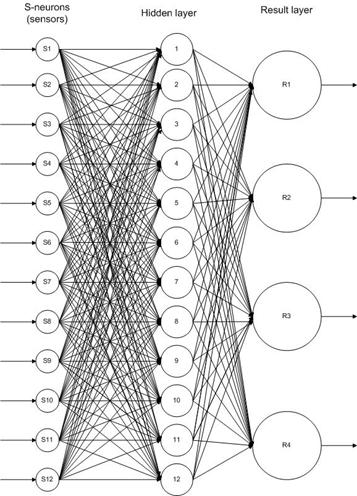
Рис. 3. Архитектура нейронной сети перекрестка
Архитектура разработанной нейронной сети рассмотренного выше перекрестка изображена на рисунке 3.
Следует заметить, что нейронная сеть для других типов перекрестков будет отличаться только количеством нейронов в слоях.
Для того, чтобы более правдоподобно оценить дорожную ситуацию на рассматриваемом перекрестке,необходимо владеть информацией о загруженности соседних перекрестков.Это возможно только объединив несколько перекрестковв единую транспортную сеть. К настоящему времени создана система, способная связывать между собой нейронные сети перекрестков, тем самым создавая транспортную сеть участка дороги. На рисунке 4 приведен пример транспортной сети, состоящей из пяти перекрестков описанного выше типа.
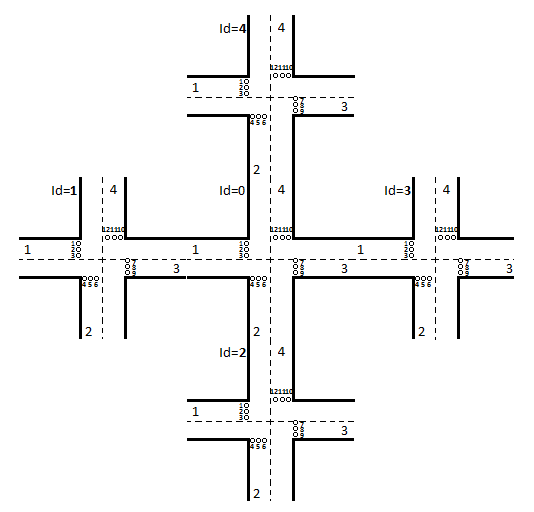
Рис.4. Пример транспортной сети
Заключение
Следующим шагом проектирования интеллектуальной системы управления светофорами является обучение полученных нейронных сетей перекрестков в отдельности и всей системы в целом. В настоящее время ведутся работы в этом направлении.
Часть нейронной сети перекрестка, решающую задачу кластеризации, предполагается обучить по алгоритму «с учителем»[2]. Часть нейронной сети, отвечающая за получение оптимального решения, не может быть обучена «с учителем», т.к. точный результат ее работы неизвестен. Был найден способ машинного обучения, являющийся разновидностью обучения без учителя, – обучение с подкреплением[5], который и будет использоваться.С целью получения необходимого количества входных данных для обучения нейронных сетейпредполагается создать приложение, позволяющее моделировать потокитранспортных средств на рассматриваемом участке транспортной сети.
Рецензенты:ХраниловВ.П., д.т.н., профессор, профессор кафедры "Компьютерные технологии в проектировании и производстве", ФГБОУ ВПО "Нижегородский государственный технический университет им. Р.Е.Алексеева", г. Нижний Новгород.
КрыловВ.В., д.т.н., профессор, начальник лаборатории "Технологии больших данных", ФГБОУ ВПО "Нижегородский государственный технический университет им. Р.Е.Алексеева", г. Нижний Новгород.
Библиографическая ссылка
Тимофеева О.П., Малышева Е.М., Соколова Ю.В. ПРОЕКТИРОВАНИЕ ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ СВЕТОФОРАМИ НА ОСНОВЕ НЕЙРОННОЙ СЕТИ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/ru/article/view?id=16496 (дата обращения: 25.06.2026).