



Развитие информационных технологий, а также в целом технический прогресс позволили вывести тактико-технические возможности подвижных объектов на существенно новый уровень. Большая заслуга в этом принадлежит развитию в области решения задач ориентации и навигации. Системы на борту летательного аппарата (ЛА), решающие эти задачи, объединяются в информационно-управляющие комплексы ориентации и навигации (КОН). В последнее время одной из главных целей является повышение точности и надежности определения параметров ориентации и навигации.
К числу основных систем навигации принадлежат инерциальные системы навигации (ИНС) и спутниковые системы навигации (СНС). Каждая из этих систем имеет свои достоинства и недостатки. Современным ЛА, использующим КОН, не хватает точности, которую могут предоставить ИНС и СНС по отдельности. Выходом из этой ситуации является интегрированная система, в которой ИНС и СНС дополняют друг друга. Достоинства их совместного использования хорошо известны [4; 5; 7; 8]. В таких интегрированных системах часто используются бесплатформенные инерциально-навигационные системы ввиду их повышенной надежности, меньшего веса, меньших показателей энергопотребления и т.д. [1].
Работы по интегрированию ИНС и СНС ведутся уже достаточно давно, и в настоящее время сложилось представление о возможности комплексирования в следующих вариантах [6]:
- раздельная схема;
- слабо связанная схема;
- жестко связанная схема;
- глубоко интегрированная схема.
Раздельная схема
Самый простой вариант совместного использования ИНС и СНС (рис. 1). Принцип работы заключается в периодическом перезапуске алгоритма ИНС с новыми начальными условиями координат и скорости, которые поступают от СНС. Это необходимо, потому что ошибки ИНС увеличиваются со временем. Получается система, обладающая более высокой точностью в вычислении координат, скорости и углам ориентации по сравнению с ИНС и СНС. Изменения в уже существующих КОН для построения такой системы требуются минимальные.
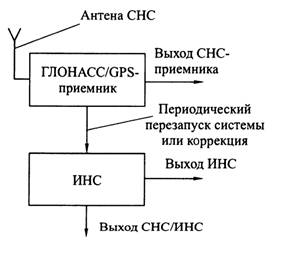
Рис. 1. Раздельная схема комплексирования СНС и ИНС
Слабо связанная схема
ИНС и СНС в слабо связанной схеме работают независимо, но появляется независимый блок, отвечающий за коррекцию данных, полученных от СНС с помощью интегрального фильтра Калмана (рис. 2).
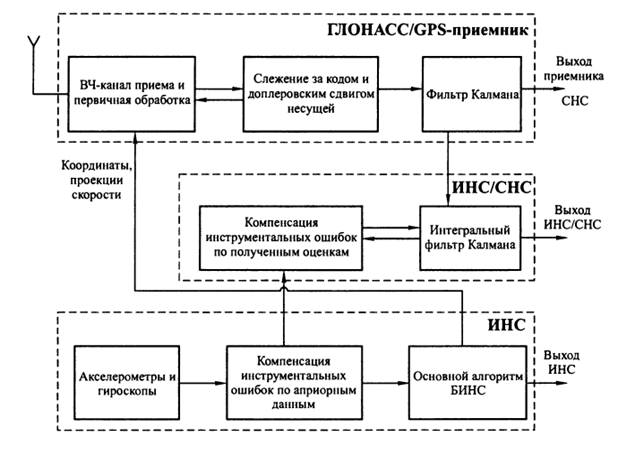
Рис. 2. Слабо связанная схема комплексирования ИНС и СНС
Здесь функциональное разделение систем может сопровождаться физическим разделением: СНС, ИНС и блок вычислителя-корректора оформляются в виде законченных блоков, между которыми организованы соответствующие информационные связи, не требующие высоких скоростей при передаче данных.
В этой схеме СНС использует информацию от ИНС только для целей более надежного восстановления захвата после его потери (связь выходного блока ИНС и ВЧ-приемника). Структура ИНС позволяет скорректировать данные измерительных приборов по априорным данным, полученным, например, в предыдущей итерации. Блок, который соединяет блоки СНС и ИНС, является интегральным блоком Калмана. В его задачи входят получение данных от обеих систем, вычисление разности показаний и на этой основе определение величины ошибки оценки ИНС. После этого данные об ошибке отправляются в ИНС посредством блока компенсации инструментальных ошибок.
В слабо связанной схеме, как и в раздельной, данные вырабатываются независимо у ИНС и СНС. Слабо связанная схема является «каскадной» в силу двух последовательно включенных фильтров Калмана. Плюсом такой схемы является высокая надежность комплексной системы, а минусом – взаимная корреляция ошибок оценок на выходе фильтра спутникового приемника и их отличие от белых шумов [1]. Существует 3 вида слабо связанных схем: стандартная, «агрессивная», MAGR-схема (Military Airborne GPS Receiver).
Жестко связанная схема
В такой системе роль ИНС сводится только лишь к определению первичных параметров поступательного и вращательного движений (рис. 3). Поэтому блоки ИНС представляют собой лишь блоки инерциальных измерителей (акселерометры и гироскопы). В СНС фильтр Калмана отсутствует. Измерения с СНС и ИНС идут в общий вычислительный блок, в котором реализован интегральный фильтр Калмана.
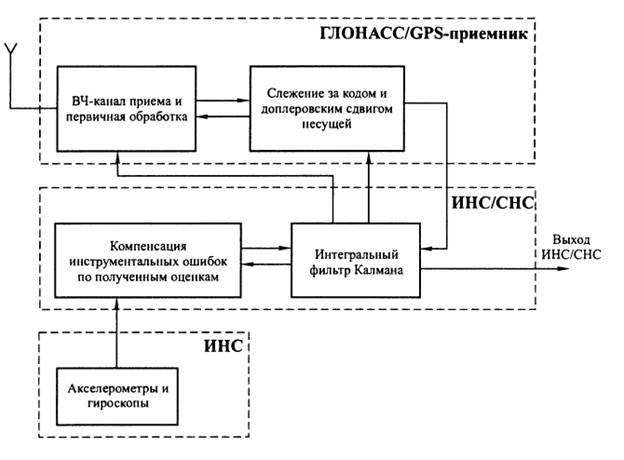
Рис. 3. Жестко связанная схема комплексирования ИНС и СНС
По сравнению с разделительными и слабо связанными системами жестко связанные системы более точны, а интегральный фильтр позволяет использовать все доступные спутники. Например, при одной и той же точности ИНС на 20-й минуте автономного полета жестко связанная схема дает в 1,5–2 раза меньшие ошибки определения координат, чем слабо связанная схема. Также они различаются временами потери работоспособности аппаратуры потребителей [там же]. Но из-за того, что становится доступным лишь одно совместное решение, это приводит к потере избыточности системы.
Достоинства таких систем [там же]:
- отсутствие проблемы взаимной корреляции шумов измерений и их отличие от белых шумов;
- отсутствие проблемы синхронизации измерений БИНС и СНС, так как используется один формирователь тактовых частот;
- обнаружение и отбраковка «плохих» измерений псевдодальностей, так как появляется возможность их контроля по предсказанным значениям, формируемым с использованием данных от БИНС.
Недостатки [там же]:
- необходимость разработки специальной аппаратуры потребителя (приемника);
- использование сложных уравнений измерения;
- ухудшение надежности, так как отказ в БИНС приводит к отказу системы в целом.
Глубоко интегрированная схем
Такие системы более сложные с точки зрения организации их структуры (рис. 4).
Рис. 4. Глубоко интегрированная схема комплексирования ИНС и СНС
Все оценки производятся в интегральном фильтре Калмана, а ГЛОНАС/GPS – приемник еще более упрощается. В интегральном фильтре Калмана вычисляются не только ошибки ИНС, но и оценки псевдодальностей и псевдоскоростей. Такой фильтр должен обладать двадцатым-сороковым порядком, и для его реализации нужны ЭВМ с большим быстродействием, что затрудняет продвижение таких систем на современный рынок БПЛА.
Достоинства [там же]:
- отсутствие проблемы «каскадного» включения фильтров;
- компактность;
- пониженные требования по энергообеспечению;
- обнаружение и отбраковка «плохих» измерений псевдодальностей, так как появляется возможность их контроля по предсказанным значениям, формируемым с использованием данных от БИНС.
Недостатки [там же]:
- вектор состояния содержит до 40 компонентов, и фильтр трудно реализуем;
- имеется необходимость разработки специальных датчиков.
Заключение
В [2] приведены примеры реализации схем комплексирования в современных навигационных системах, а также даны их качественные и количественные характеристики. Степень интеграции оказывает качественное влияние на показатель целостности: он увеличивается на 9,90165![]() для жестко связанной схемы интегрирования и на 1,63733
для жестко связанной схемы интегрирования и на 1,63733![]() — для глубоко интегрированной схемы по сравнению с показателем целостности для слабо связанной интеграции. Вероятность ложного отказа увеличивается на 1,10576
— для глубоко интегрированной схемы по сравнению с показателем целостности для слабо связанной интеграции. Вероятность ложного отказа увеличивается на 1,10576![]() для жестко связанной схемы, для глубоко интегрированной схемы — на
для жестко связанной схемы, для глубоко интегрированной схемы — на ![]() по сравнению с показателем для слабо связанной схемы интегрирования. Также вероятность необнаруженного отказа уменьшается для сильно связанной схемы на –1,07261
по сравнению с показателем для слабо связанной схемы интегрирования. Также вероятность необнаруженного отказа уменьшается для сильно связанной схемы на –1,07261![]() , а для глубоко интегрированной схемы — на 7,10448
, а для глубоко интегрированной схемы — на 7,10448![]() по сравнению с показателем для слабо связанной схемы интеграции [3].
по сравнению с показателем для слабо связанной схемы интеграции [3].
Последние три схемы получают из фильтра Калмана оценки погрешностей ИНС, которые можно использовать для коррекции датчиков ИНС, следовательно, улучшая работу ИНС в автономном режиме. Таким образом, при комплексировании СНС и БИНС по жестко связанным и слабо связанным схемам или глубоко интегрированной схеме возможно улучшение характеристик автономных БИНС не только по координатам, но и по другим параметрам.
Рецензенты:
Поршнев С.В., д.т.н., профессор, зав. кафедрой радиоэлектроники информационных систем Уральского Федерального Университета имени первого Президента России Б.Н. Ельцина, г. Екатеринбург;
Иванов В.Э., д.т.н., профессор, зав. кафедрой технологии и средств связи Уральского Федерального Университета имени первого Президента России Б.Н. Ельцина, г. Екатеринбург.
Библиографическая ссылка
Суворов М.А. АНАЛИЗ ВАРИАНТОВ ИНТЕГРИРОВАННЫХ НАВИГАЦИОННЫХ СИСТЕМ // Современные проблемы науки и образования. – 2015. – № 1-1. ;URL: https://science-education.ru/ru/article/view?id=19414 (дата обращения: 25.04.2024).