



Проблема управления насыщенными транспортными потоками принципиально отличается от проблем управления при свободном или групповом движении. Основное отличие состоит в том, что в условиях насыщенного движения традиционными методами управления светофорными объектами невозможно обеспечить приемлемый для водителей уровень обслуживания. Состояние светофорного объекта характеризуется превышением интенсивности движения пропускной способности пересечения и, как следствие, неограниченным ростом очереди перед ним.
В транспортных сетях проблема осложняется невозможностью локализовать режим перенасыщения в пределах данного регулируемого пересечения, первоначально явившегося источником образования транспортного затора. Неограниченный рост очереди блокирует транспортные связи предыдущего по ходу движения перекрестка, что, в свою очередь, вследствие связности сети, способствует распространению затора на всю сеть. Таким образом, важнейшей задачей управления движением в условиях насыщенного движения является предотвращение возникновения условий возникновения общесетевых заторов.
Постановка задачи управления светофорного объекта в условиях насыщенного движения
Задача управления оптимального управления изолированным перекрестком может быть сформулирована как задача минимизации суммарных потерь транспорта и взвешенного риска блокирования транспортных связей [3]:
 (1)
(1)
при ограничениях на длительность разрешающих сигналов:
![]() ; (2)
; (2)
где dj( ) – функция средней задержки транспортных средств; gi(t+n.kc) – длительность разрешающего сигнала в i фазе на n шаге управления, с; gmin и gmax – соответственно, минимальная и максимальная длительность разрешающего сигнала, с; Fjin(t+n.kc) – максимальное удаление фронта очереди от стоп-линии, м; Lj – длина группы полос движения j, м; Fpen( ) – функция штрафа:
![]() , (3)
, (3)
Методику определения положения фронта очереди транспортных средств и условия блокирования транспортных связей можно найти в работе [5].
Одним из перспективных методов управления, который может быть успешно применен для управления насыщенными транспортными потоками, является управление с использованием прогнозирующих моделей (Model Predictive Control – MPC) [2]. Основой управления с прогнозирующей моделью является схема управления динамическими объектами по принципу обратной связи. На каждом шаге управления решается задача оптимального управления на прогнозируемый период ks (именуемый горизонтом прогноза) и реализуется на горизонте управления kc, следующим образом:
1) рассматривается математическая модель объекта управления, начальными условиями для которой служит его текущее состояние. При заданном программном управлении выполняется моделирование состояния объекта на горизонте прогноза ks;
2) выполняется оптимизация программного управления, целью которого служит приближение регулируемых переменных прогнозирующей модели к оптимальным значениям на горизонте прогноза. Оптимизация осуществляется с учётом ограничений, накладываемых на управляющие и регулируемые переменные;
3) на временном шаге kc, именуемом горизонтом управления и составляющем фиксированную малую часть горизонта прогноза ks, реализуется найденное оптимальное управление и осуществляется измерение (или оценка по измеренным переменным) фактического состояния объекта на конец шага управления;
4) горизонт прогнозирования смещается на горизонт управления ks и задача оптимального управления решается вновь (повторяются п. 1 – 3).
Для объективной оценки эффективности предложенного метода локального управления работой светофорного объекта в программе SUMO создана микроскопическая имитационная модель пересечения двух городских улиц – горизонтальной и вертикальной (рисунок1). Особенности использования моделей SUMO и методика калибровки для оценки эффективности алгоритмов управления транспортными потоками приведены в работе [1, 6]
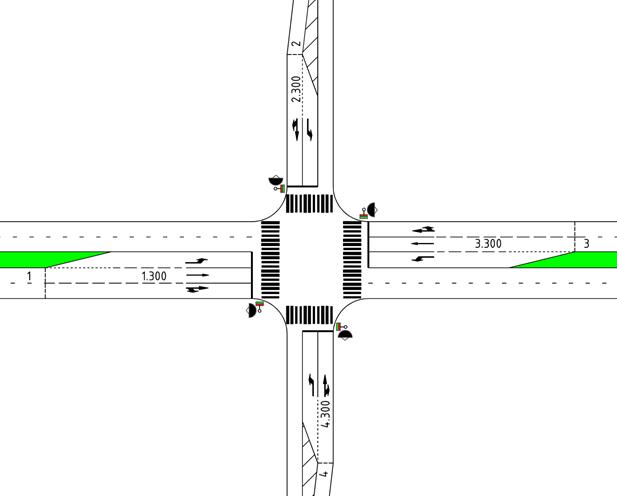
Рис. 1. Схема перекрестка
Горизонтальная улица (связи 1 и 3) имеет на подходе к пересечению по 2 полосы движения в каждом направлении, вертикальная (связи 2 и 4) – по 1 полосе. Для выполнения левых поворотов выделены дополнительные полосы протяженностью 300 м по горизонтальной улице (связи 1.300 и 3.300) и 90 м по вертикальной (связи 2.300 и 4.300). Протяженность подходов к перекрёстку горизонтальной улицы составила 600 м, вертикальной – 400 м.
На моделируемом пересечении организован бесконфликтный пропуск пешеходных и транспортных средств:
– в первой фазе производится пропуск потоков прямого направления и правоповоротных потоков по горизонтальной улице;
– во второй фазе пропускаются левоповоротные потоки с горизонтальной улицы;
– в третьей фазе производится пропуск потоков прямого направления и правоповоротных потоков по вертикальной улице;
– в четвертой фазе пропускаются левоповоротные потоки с вертикальной улицы;
– в пятой фазе производится пропуск пешеходов.
Интенсивность на входах в транспортную сеть (связи 1, 2, 3 и 4) в процессе моделирования варьировалась по трем периодам (рисунок 2). В первом периоде (с 0 по 30 мин.) интенсивность движения составляла около 300 авт/ч на полосу движения по всем подходам к пересечению.

Рис. 2. Динамика транспортного спроса
Во втором периоде (с 30 по 90 мин.) интенсивность по горизонтальной улице (связи 1 и 3) увеличена до 500 - 600 авт/ч на полосу движения. В третьем периоду моделирования (с 90 по 120 мин) по горизонтальной улице интенсивность движения уменьшена до 400 авт/ч на полосу движения, а по вертикальной (связи 2 и 4) – увеличена до 500 – 600 авт/ч на полосу движения.
Доля поворотных потоков по вертикальной улице за весь период моделирования постоянна и составляла: правоповоротные потоки 20%; левоповоротные потоки 20%; прямое направление 60%. По горизонтальной улице доля поворотных потоков варьировалась в следующих пределах: правоповоротные потоки 22,7 … 10%; левоповоротные потоки 21,4 … 10%; прямое направление 77,1 … 56,9%.
Управление процессом моделирования и работой виртуального дорожного контроллера производилось программой написанной на языке программирования Python. Для взаимодействия с программой SUMO использовался модуль TraCI, обеспечивающий:
– модификацию желаемой скорости движения всех входящих в сеть автомобилей по логнормальному закону распределения;
– измерение интенсивности движения при помощи виртуальных детекторов транспорта, имитирующих работу индуктивных петлевых детекторов;
– установку рассчитанных режимов работы светофорного объекта в имитационной модели.
В качестве базового метода управления принята традиционная методика расчета режима работы светофорного объекта. В конце каждого цикла регулирования производился перерасчет длительности фаз на основании данных об интенсивности движения, измеренных виртуальными детекторами транспорта. На основе полученных измерений выполнялся прогноз интенсивности движения на горизонт моделирования [4]. Предлагаемое управление предусматривало расчет длительности фаз в конце каждого цикла регулирования. Длительности фаз определялись путем решения ранее задачи оптимизации (1-2). Оценка продолжительности задержки транспортных средств на горизонте прогнозирования, входящей в целевую функцию управления, проводилась по методике, приведенной в Highway Capacity Manual 2000[7]. Штраф за превышение фронтом очереди максимального предустановленного значения назначался путем умножения величины задержки на весовой коэффициент w=6.
Суммарная задержка транспортных средств по всем связям при базовом и предлагаемом управлении приведена на рисунке 3. При интенсивности движения 300 авт/ч на полосу (начальный период моделирования с 0 по 30 мин) использование базового управления обеспечивает более эффективное функционирование пересечения, выраженное в меньшей на 35% величиной задержки сравнении с предлагаемым методом управления. В дальнейшем при увеличении интенсивности движения наблюдается преимущество предложенного метода управления над базовым методом, выражаемое в снижении задержки транспортных средств в 1,3 – 2,3 раза и увеличении количества вошедших в моделируемую транспортную сеть автомобилей (рисунок 4) в 1,21 – 1,53 раза в сравнении с базовым методом.
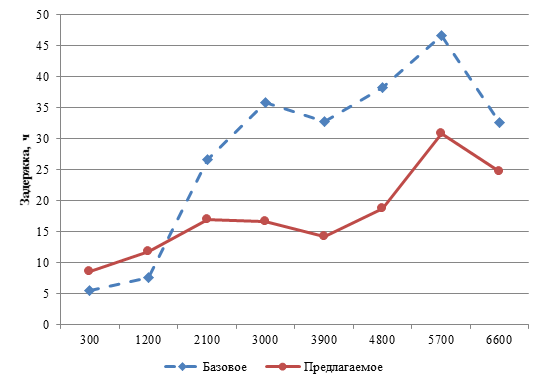
Рис.3. Задержка транспортных средств
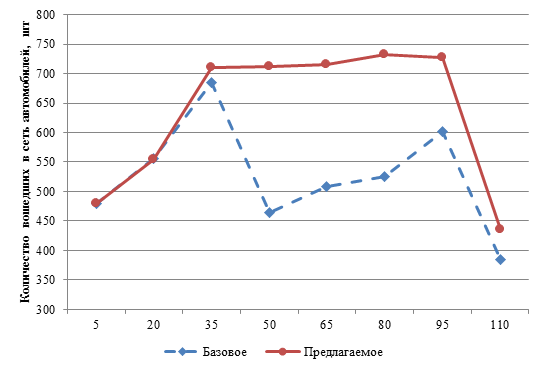
Рис. 4. Количество вошедших в транспортную сеть транспортных средств
В начальный период моделирования очередь транспортных средств на регулируемом пересечении локализовалась в пределах связей 1.300, 2.300, 3. 300 и 4.300. При последующем увеличении интенсивности движения длина очередей возросла и распространилась на связи 1, 2, 3 и 4.
При использовании базового управления на связях 1 и 3 горизонтальной улицы с 30 по 50 минуту моделирования происходило увеличение плотности транспортного потока и в последствие блокирование связей. На вертикальной улице в указанный период увеличение длины очередей, и соответственно повышения плотности транспортного потока, не наблюдалось. Предпосылки к образованию транспортного затора на вертикальной улице в виде повышение плотности транспортного потока свыше критического значения rcrit= 39-46 авт/км/полосу наблюдаются в третий период моделирования (с 90 мин) при увеличении интенсивности движения до 500 – 600 авт/ч.
Предлагаемый метод управления минимизирует взвешенную задержку транспортных средств, что ожидаемо, обеспечивая более благоприятные условия движения на направлениях с большим транспортным спросом. Так за период моделирования плотность транспортного потока на связях 1 и 4 горизонтальной улицы практически не превышала критического значения. На связях 2 и 4 вертикальной улицы плотность транспортного потока сопоставима со значениями, полученными при базовом управлении, при этом превышение плотностью значения rcrit наблюдалось только в заключительный период моделирования.
Заключение
Результаты моделирования использования предложенного метода локального управления показали его работоспособность и эффективность в сравнении с традиционным методом расчета режимов работы светофорных объектов.
Отметим, что использование, как предложенной, так и иной формулировки задачи локального управления светофорным объектом позволяет исключить блокирование смежных пересечений только в ограниченный период. В том случае, если не удается локализовать транспортный затор на уровне отдельного пересечения, требуется решение указанной задачи на уровне сети.
Рецензенты:
Родионов Ю.В., д.т.н., профессор кафедры «Эксплуатация автомобильного транспорта» ФГБОУ ВПО «Пензенский государственный университет архитектуры и строительства», г. Пенза;
Бажанов А.П., д.т.н., профессор кафедры «Геотехника и дорожное строительство» ФГБОУ ВПО «Пензенский государственный университет архитектуры и строительства», г. Пенза.
Библиографическая ссылка
Власов А.А., Орлов Н.А., Перекусихина И.А. УПРАВЛЕНИЕ СВЕТОФОРНЫМ ОБЪЕКТОМ В УСЛОВИЯХ НАСЫЩЕННОГО ДВИЖЕНИЯ // Современные проблемы науки и образования. – 2014. – № 6. ;URL: https://science-education.ru/ru/article/view?id=15573 (дата обращения: 16.04.2024).