



Задача синтеза оптимального управления состоит в том, чтобы найти управление, зависящее от координат пространства состояния объекта. Для синтеза системы управления разработан новый численный метод на основе сетевого оператора [1-6, 8-10].
Основная сложность построения численных алгоритмов синтеза оптимального управления заключается в том, что поиск решения задачи необходимо производить на пространстве формальных соотношений. Сетевой оператор позволяет представлять математические выражения в виде целочисленной матрицы. Поиск возможного решения осуществляется с помощью генетического алгоритма.
При большой размерности матрицы такое представление не всегда эффективно, т.к. она содержит большое количество нулевых элементов. В настоящей работе применяется многослойный сетевой оператор, который представляет собой совокупность связанных ориентированных графов, каждый из которых описывается с помощью целочисленной матрицы меньшей размерности, чем весь сетевой оператор.
1. Постановка задачи
Рассмотрим задачу синтеза системы управления маневром беспилотного летательного аппарата. Математическая модель объекта управления имеет следующий вид
![]() , (1)
, (1)
 , (2)
, (2)
 , (3)
, (3)
 , (4)
, (4)
 , (5)
, (5)
 , (6)
, (6)
где V- воздушная скорость самолета, θ- угол наклона траектории, ψ- угол пути, xc- продольная дальность полета, H- высота полета, zc- боковая дальность полета.
Заданы начальные значения
 . (7)
. (7)
Задана траектория движения в трехмерном пространстве в виде упорядоченного множества N точек
 . (8)
. (8)
Заданы функционалы качества
 , (9)
, (9)
 . (10)
. (10)
Значения компонент вектора управления ограничены
![]() . (11)
. (11)
Необходимо найти управление в виде
 , (12)
, (12)
где  - искомая нелинейная вектор-функция, аргументами которой являются вектор пространства состояний
- искомая нелинейная вектор-функция, аргументами которой являются вектор пространства состояний ![]() и вектор постоянных параметров
и вектор постоянных параметров ![]() , который находится в процессе синтеза.
, который находится в процессе синтеза.
Управление должно удовлетворять ограничениям (11) и минимизировать функционалы (9), (10). Функционалы описывают нормы отклонений положений центра масс летательного аппарата от заданной программной траектории (8).
При управлении летательным аппаратом задается текущая точка программной траектории  ,
, ![]() . Синтезированная система управления должна обеспечить приближение летательного аппарата к точке программной траектории. При достижении окрестности текущей точки
. Синтезированная система управления должна обеспечить приближение летательного аппарата к точке программной траектории. При достижении окрестности текущей точки ![]() осуществляется переключение на следующую точку программной траектории
осуществляется переключение на следующую точку программной траектории  . Если за время
. Если за время ![]() окрестность заданной точки не была достигнута, то переключение на новую точку осуществляется по времени
окрестность заданной точки не была достигнута, то переключение на новую точку осуществляется по времени ![]() . Управление должно зависеть от координат состояния объекта и программной траектории. Переключение точек во времени осуществляется только в случае большого отклонения от программной траектории. Для решения задачи используем метод сетевого оператора.
. Управление должно зависеть от координат состояния объекта и программной траектории. Переключение точек во времени осуществляется только в случае большого отклонения от программной траектории. Для решения задачи используем метод сетевого оператора.
2. Метод сетевого оператора
Сетевой оператор представляет собой структуру данных, которая предназначена для эффективного описания математических выражений. Для формального построения сетевого оператора вводим четыре конечных упорядоченных множества [8], из элементов которых состоит математическое выражение: множество переменных ![]() , множество параметров
, множество параметров ![]() , множество унарных операций
, множество унарных операций  , множество бинарных операций
, множество бинарных операций  . Все бинарные операции отвечают свойствам коммутативности, ассоциативности и должны иметь единичный элемент. Множество бинарных операций должно быть непустым
. Все бинарные операции отвечают свойствам коммутативности, ассоциативности и должны иметь единичный элемент. Множество бинарных операций должно быть непустым  .
.
В памяти ЭВМ сетевой оператор представляется в виде матрицы сетевого оператора ![]() ,
,  . В качестве примера рассмотрим матрицу сетевого оператора для математического выражения
. В качестве примера рассмотрим матрицу сетевого оператора для математического выражения ![]() . Зададим конструктивные множества
. Зададим конструктивные множества  ,
, ![]() ,
,  ,
,  . Матрица сетевого оператора имеет вид
. Матрица сетевого оператора имеет вид
 .
.
Для вычисления математического выражения по матрице сетевого оператора вводим вектор узлов ![]() . Для вычисления используем соотношение
. Для вычисления используем соотношение
 (13)
(13)
где ![]() ,
,  .
.
Для данного примера вектор узлов имеет следующие начальные значения  . Методика вычислений по сетевому оператору подробно описана в работах [1-3, 8-10]. Полученное математическое выражение хранится в элементе
. Методика вычислений по сетевому оператору подробно описана в работах [1-3, 8-10]. Полученное математическое выражение хранится в элементе ![]()
 .
.
Вычисление по сетевому оператору не требует анализа символов строк и выполняется достаточно быстро. Использование сетевого оператора позволило применить генетический алгоритм для поиска оптимального математического выражения при решении задач синтеза систем управления, идентификации, аппроксимации и др.
Сложность математических выражений определяет размерность матрицы сетевого оператора. Для больших матриц при вычислениях с помощью соотношения (13) приходится просматривать большое количество нулевых элементов,  . Чтобы сократить число нулевых элементов в матрице сетевого оператора, используем вместо одного сетевого оператора с большим количеством узлов многослойный сетевой оператор, который состоит из нескольких сетевых операторов, соединенных друг с другом.
. Чтобы сократить число нулевых элементов в матрице сетевого оператора, используем вместо одного сетевого оператора с большим количеством узлов многослойный сетевой оператор, который состоит из нескольких сетевых операторов, соединенных друг с другом.
3. Многослойный сетевой оператор
Многослойный сетевой оператор [8] описывается несколькими матрицами сетевых операторов меньшей размерности, чем матрица исходного сетевого оператора.
При построении многослойного сетевого оператора необходимо в каждый слой добавлять узлы-источники, которые содержат значения переменных, определяющих результаты вычислений сетевого оператора предыдущего слоя. Для разбиения сетевого оператора на два слоя необходимо найти определенное подмножество узлов, которые после разбиения стали бы узлами-стоками для одного слоя и узлами-источниками для другого.
Множество разбиения сетевого оператора - это подмножество узлов, которые отвечают следующим свойствам: а) любой путь от узла-источника до узла-стока должен проходить через узел множества разбиения; б) между любой парой узлов множества разбиения не должно быть пути; в) если к узлу, не принадлежащему множеству разбиения, ведет путь через узел, принадлежащий множеству разбиения, то все остальные пути к этому узлу должны также идти через узлы, принадлежащие множеству разбиения.
Для сетевого оператора математического выражения ![]() (рис. 1 а) в качестве множества разбиения используем узлы 6 и 7. В результате получаем два слоя сетевого оператора, которые изображены на рис. 1 б, в.
(рис. 1 а) в качестве множества разбиения используем узлы 6 и 7. В результате получаем два слоя сетевого оператора, которые изображены на рис. 1 б, в.
|
а) Исходный сетевой оператор |
б) Слой 1 |
в) Слой 2 |
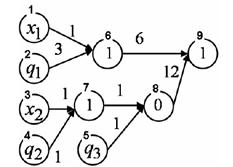

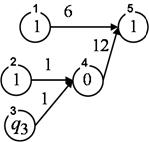
Рис. 1. Пример разделения сетевого оператора на два слоя
Слой 1 сетевого оператора описывает два математических выражения  и
и  . Слой 2 соответствует математическому выражению
. Слой 2 соответствует математическому выражению  .
.
Матрицы слоев сетевого оператора имеют следующий вид:
 ,
,  .
.
В результате вместо одного операторного уравнения
имеем два операторных уравнения с матрицами сетевых операторов меньшего размера
 ,
,  .
.
При разбиении матрицы сетевого оператора необходимо учитывать рабочее пространство матрицы для описания математических выражений [8]. Чем меньше величина рабочего пространства, тем эффективнее используется каждый элемент матрицы сетевого оператора для описания математического выражения. Величину рабочего пространства вычисляем по формуле
![]() , (14)
, (14)
где L- размерность матрицы сетевого оператора, m- количество узлов-источников.
4. Синтез системы управления
Для решения задачи (1)-(12) использован специальный комплекс программ [10].
Матрица сетевого оператора состояла из двух слоев ![]() и
и ![]() . Первый слой имел размерность 18х18 и 12 узлов-источников, второй слой имел размерность 30х30 и 16 узлов-источников. Рабочие пространства матриц слоев сетевого оператора имели следующие значения:W1 = 93, W2=329. Всего
. Первый слой имел размерность 18х18 и 12 узлов-источников, второй слой имел размерность 30х30 и 16 узлов-источников. Рабочие пространства матриц слоев сетевого оператора имели следующие значения:W1 = 93, W2=329. Всего  элемента. В качестве альтернативы рассматривался один сетевой оператор размерностью 32х32 и 12 узлов-источников. Его рабочее пространство составляло
элемента. В качестве альтернативы рассматривался один сетевой оператор размерностью 32х32 и 12 узлов-источников. Его рабочее пространство составляло ![]() элементов.
элементов.
В результате было получено следующее управление
![]() ,
,  ,
,  ,
,
где
![]()
 ,
,
![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
,  ,
,
 ,
,  ,
,  ,
,  ,
,  ,
,
 ,
, ![]() ,
, ![]() .
.
На рис. 2 приведены результаты моделирования синтезированной системы управления. На графиках точками указана программная пространственная траектория.
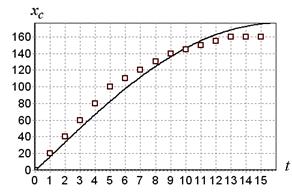
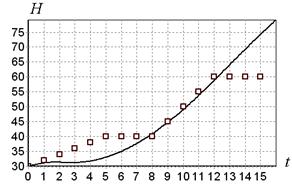
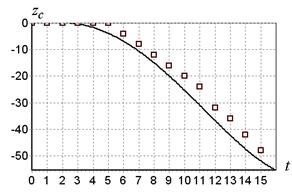
Рис. 2. Результаты моделирования
Вычислительный эксперимент проведен в среде Borland Developer Studio 2006.
Работа выполнена по темам грантов РФФИ №10-08-00618-а «Исследование и разработка численных методов идентификации нелинейных систем управления» и № 11-08-00532-а «Исследование методов синтеза интеллектуальных систем управления».
5. Заключение
Метод сетевого оператора позволяет синтезировать систему управления пространственным движением летательного аппарата. В результате использования многослойного сетевого оператора удается сократить количество просматриваемых в результате вычислений элементов.
Рецензенты:
-
Никульчев Е. В., д.т.н., профессор, проректор по информатизации, зав. кафедрой прикладной математики и моделирования систем Всероссийской государственной налоговой академии Министерства финансов РФ, г. Москва.
-
Юрков Н. К., д.т.н., профессор, зав. кафедрой конструирования и производства радиоаппаратуры Пензенского государственного университета, г. Пенза.
Библиографическая ссылка
Софронова Е.А., Дивеев А.И. МЕТОД МНОГОСЛОЙНОГО СЕТЕВОГО ОПЕРАТОРА ДЛЯ СИНТЕЗА СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ // Современные проблемы науки и образования. – 2012. – № 3. ;URL: https://science-education.ru/ru/article/view?id=6170 (дата обращения: 18.04.2024).