



На создание новых поршневых двигателей внутреннего сгорания (ДВС) во всем мире ежегодно расходуются значительные средства, расходы эти с каждым годом возрастают и составляют значительную долю бюджета многих развитых стран. За последние годы резко возросли литровая мощность и экономичность ДВС, до десятых долей килограмма снизился их удельный вес, улучшились и другие оценочные показатели. Ужесточение экономических и экологических требований к поршневым ДВС побуждают непрерывно совершенствовать топливорегулирующую аппаратуру (ТРА) этих двигателей. Вполне очевидно, что на достигнутом уровне технического прогресса развитие и совершенствование любых ТРА немыслимо без целеустремленной и согласованной работы конструкторов, технологов и испытателей. Роль последних приобрела особую значимость, так как оценка параметров, определение ее соответствия эксплуатационным требованиям в конечном итоге принадлежит испытателям. Современная ТРА является сложной технической системой, в состав которой входят пространственный многозвенный исполнительный механизм (ИМ), система автоматического управления, основными компонентами которой являются информационно-управляющая система, алгоритмическое и программное обеспечение. Совершенство ТРА в значительной степени определяется совершенством системы управления, показатели которой существенно зависят от принципиальных решений и выбора параметров измерительных устройств, а также их конкретных реализаций. Адекватное математическое описание, например, регулятора массы топлива как сложного многомерного объекта также необходимо при разработке системы управления ТРА [4].
Расходомеры массы топлива являются одним из основных элементов ТРА. Непосредственно взаимодействуя с исполнительными механизмами ТРА, они во многом определяют эффективность работы ТРА. Быстрое развитие за прошедшие два десятилетия конструкции ТРА, необходимость улучшения реализованных и решения новых проблем выдвигают на передний план задачу повышения основных метрологических параметров существующих расходомеров массы топлива. Основными требованиями к таким расходомерам являются: высокое, а в некоторых случаях - экстремально высокое быстродействие всех подсистем расходомера в режиме реального времени; цифровая обработка всех информационных потоков с использованием принципов распараллеливания и поточной конвейеризации вычислений; реализация измерительных и управляющих процедур с применением высокоточных вычислительных и адаптивных методов.
Особенность измерения расхода топлива в автомобильных и тракторных двигателях характеризуется тем, что часовой расход может изменяться в пределах 10 ÷ 60 кг на режимах полных нагрузок и снижается до 0,5 ÷ 2,0 кг на холостом ходу. Поэтому при проектировании расходомеров массы топлива для ДВС предпочтение отдают расходомерам, обладающим линейной характеристикой и отличающимся большой чувствительностью и разрешающей способностью, быстродействием и малыми габаритами, позволяющими размещать их в труднодоступных зонах ДВС. Весьма высокие требования должны также предъявляться к эффективности алгоритмического и программного обеспечения, среди которых ведущими качественными характеристиками являются быстродействие и стоимость.
Современная измерительная техника использует ряд методов измерения расхода массы топлива. Однако все эти методы при измерениях расхода массы топлива обладают рядом недостатков. Поэтому современные системы точного измерения массы топлива должны быть основаны на измерении объема и удельной массы топлива (поток массы при этом определяют умножением потока объема на удельную массу). Дальнейшее развитие этих измерителей связано с измерениями объема и плотности топлива путем измерения объемного расхода, давления и температуры и пересчета их по уравнению состояния.
В Уфимском государственном авиационном техническом университете в течение ряда лет разрабатывались и внедрялись опытные образцы нескольких типов расходомеров массы топлива. В этих расходомерах используется адаптивный метод коррекции нелинейностей в метрологических характеристиках датчиков объемного расхода, давления и температуры [5]. Применяется последовательная (рис. 1) и параллельная (рис. 2) схемы включения устройств адаптивной коррекции к датчикам. Аргументами функции в этих схемах адаптивной коррекции являются величины, характеризующие отклонения реальной функции преобразования (РФП) от идеальной функции преобразования (ИФП).
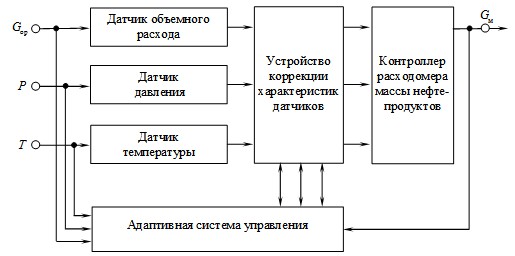
Рис. 1. Последовательная схема адаптивной коррекции
Направления, по которым проводятся работы по созданию быстродействующих расходомеров массы топлива, следующие: увеличение быстродействия и производительности всех подсистем; повышение точности датчиков; увеличение надежности всех элементов; усовершенствование алгоритмов действия аппаратуры и математического обеспечения, используемых в расходомере массы; усовершенствование архитектуры в целях увеличения структурной гибкости подсистем, обеспечивающей быстрое приспособление к меняющимся условиям эксплуатации.
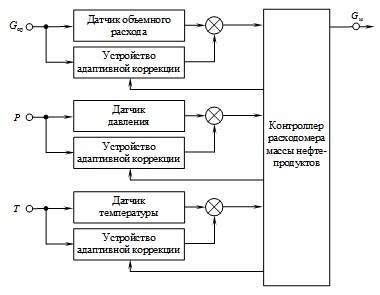
Рис. 2. Параллельная схема адаптивной коррекции
Основной задачей расходомеров массы является максимально точное определение массы топлива. Погрешности, обусловленные неточностью преобразования, измерения и обработки сигналов в функциональных блоках расходомера можно найти по зависимостям:
 , (1)
, (1)
где ![]() ,
, ![]() ,
, ![]() - реальные функции преобразования, измерения и цифровой обработки сигналов расходомера;
- реальные функции преобразования, измерения и цифровой обработки сигналов расходомера; ![]() ,
, ![]() ,
, ![]() - идеальные функции преобразования, измерения и цифровой обработки сигналов расходомера;
- идеальные функции преобразования, измерения и цифровой обработки сигналов расходомера; ![]() ,
, ![]() ,
, ![]() - погрешности измерения, обусловленные наличием помех
- погрешности измерения, обусловленные наличием помех ![]() ,
, ![]() ,
, ![]() и расхождением реальных функций от идеальных функций.
и расхождением реальных функций от идеальных функций.
Пользуясь этими обозначениями, систему уравнений (1) можно записать в виде:
![]() . (2)
. (2)
Для оценки ![]() можно учитывать различные критерии: критерий наибольшего отклонения, интегральный критерий, интегральный среднеквадратический критерий, вероятностно-зональный. Проведенные исследования позволили в качестве критерия оценки суммарной погрешности расходомера принять интегральную среднеквадратическую погрешность, определяемую в виде
можно учитывать различные критерии: критерий наибольшего отклонения, интегральный критерий, интегральный среднеквадратический критерий, вероятностно-зональный. Проведенные исследования позволили в качестве критерия оценки суммарной погрешности расходомера принять интегральную среднеквадратическую погрешность, определяемую в виде
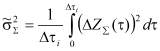 , (3)
, (3)
где ![]() - интервал аппроксимации. Исходя из особенностей модели расходомера и с учетом выбранного критерия оценки погрешности, получим:
- интервал аппроксимации. Исходя из особенностей модели расходомера и с учетом выбранного критерия оценки погрешности, получим:
![]() (4)
(4)
где ![]() ,
, ![]() ,
, ![]() - интегральные среднеквадратические значения погрешностей преобразования, измерения цифровой обработки расходомера.
- интегральные среднеквадратические значения погрешностей преобразования, измерения цифровой обработки расходомера.
Несложно показать, что интегральное среднеквадратическое значение приведенной погрешности функционального блока цифровой обработки равно:
![]() , (5)
, (5)
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() - интегральные среднеквадратические значения погрешностей квантования, аппроксимации, шума АЦП и программной обработки.
- интегральные среднеквадратические значения погрешностей квантования, аппроксимации, шума АЦП и программной обработки.
Наличие в составе расходомера нескольких АЦП (для датчиков объемного расхода, давления и температуры), осуществляющих операции квантования аналогового сигнала по уровням, приводит к появлению методических погрешностей квантования каждой АЦП. Для равномерного квантования максимальная приведенная погрешность квантования АЦП равна
![]() , (6)
, (6)
где M - число уровней квантования; ![]() - интервал квантования. Тогда интегральная среднеквадратическая погрешность квантования имеет вид
- интервал квантования. Тогда интегральная среднеквадратическая погрешность квантования имеет вид
![]() . (7)
. (7)
Как видно из выражения (7) ![]() зависит от диапазона изменения входного сигнала АЦП и числа уровней квантования. При заданном диапазоне изменения
зависит от диапазона изменения входного сигнала АЦП и числа уровней квантования. При заданном диапазоне изменения ![]() уменьшение
уменьшение ![]() может быть достигнуто увеличением M. Одновременно с выполнением операции квантования по уровню при аналого-цифровом преобразовании выполняется и операция первичного кодирования. Число M определяется следующим рядом
может быть достигнуто увеличением M. Одновременно с выполнением операции квантования по уровню при аналого-цифровом преобразовании выполняется и операция первичного кодирования. Число M определяется следующим рядом
![]() , (8)
, (8)
где ![]() - соответствующая степень основания принятой системы счисления:
- соответствующая степень основания принятой системы счисления: ![]() ,
, ![]() - основание системы счисления;
- основание системы счисления; ![]() - изображение символов (цифр) в данной системе исчисления
- изображение символов (цифр) в данной системе исчисления ![]() .
.
С учетом вышеуказанного, формула (7) может быть представлена как
![]() . (9)
. (9)
Наибольшее распространение в АЦП получила двоичная система счисления. Тогда формула (9) преобразуется
![]() , (10)
, (10)
где ![]() - разрядность АЦП. Уменьшение
- разрядность АЦП. Уменьшение ![]() возможно только увеличением разрядности
возможно только увеличением разрядности ![]() АЦП микроконтроллера.
АЦП микроконтроллера.
Как отмечено ранее, на участке дискретизации сигналы датчиков расходомера аппроксимируются полиномами. В промежуточных точках, не являющихся узлом полинома, получается погрешность, которая может быть оценена только остаточным членом. При таких оценках для сложных сигналов расходомера необходимо построить их модели, которые должны максимально приближаться по своим характеристикам к реальным сигналам расходомера. Требования, предъявляемые к моделям сигналов, в основном сводятся к следующим: модели сигналов должны с требуемой точностью описывать реальный ансамбль сигналов датчиков; в рамках принятых моделей должны решаться поставленные задачи; модели должны быть просты. Перечисленные требования достаточно противоречивы, чтобы можно было найти универсальную модель, удовлетворяющую всем требованиям. В работе [2] относительно просто и с достаточной для практики точностью теоретически определен ансамбль кусочно-стационарных сигналов датчиков адаптивного расходомера.
Так как рассматриваются адаптивные функциональные подсистемы расходомера, приспосабливающиеся к изменениям выходных сигналов датчиков температуры и давления в расходомере, то в первую очередь для их анализа необходимо знание характеристик производных сигнала ![]() . Реальные сигналы датчиков всегда имеют конечное время и конечный спектр (финитный) сигналов, что значительно расширяет класс дифференцируемых случайных функций. Если на участке дискретизации этот спектр можно описать полиномом p-ой степени, то с достаточной для практики точностью можно аппроксимировать реальные сигналы датчиков расходомера полиномами (p+1)-ой степени. Такая аппроксимация приводит к неизменности в интервале дискретизации соответствующих их производных. Ошибка же при такой аппроксимации пренебрежимо мала. Кроме того, такая модель оценки приводит к функциональной связи между погрешностью аппроксимации при дискретизации, частотой дискретизации и соответствующей производной, что удобно для анализа погрешностей преобразования следящих АЦП. В качестве модели сигнала датчика рассмотрим некоррелированную кусочно-стационарную функцию с постоянной
. Реальные сигналы датчиков всегда имеют конечное время и конечный спектр (финитный) сигналов, что значительно расширяет класс дифференцируемых случайных функций. Если на участке дискретизации этот спектр можно описать полиномом p-ой степени, то с достаточной для практики точностью можно аппроксимировать реальные сигналы датчиков расходомера полиномами (p+1)-ой степени. Такая аппроксимация приводит к неизменности в интервале дискретизации соответствующих их производных. Ошибка же при такой аппроксимации пренебрежимо мала. Кроме того, такая модель оценки приводит к функциональной связи между погрешностью аппроксимации при дискретизации, частотой дискретизации и соответствующей производной, что удобно для анализа погрешностей преобразования следящих АЦП. В качестве модели сигнала датчика рассмотрим некоррелированную кусочно-стационарную функцию с постоянной ![]() производной на интервале аппроксимации гауссовских сигналов с финитными спектрами в диапазоне
производной на интервале аппроксимации гауссовских сигналов с финитными спектрами в диапазоне ![]() . Такой выбор определяет взаимосвязь между погрешностью аппроксимации и производными сигнала датчиков, что удобно при расчетах. С учетом рекомендаций работы [1] и основываясь на выбранном критерии оценки интегральной среднеквадратической погрешности, запишем
. Такой выбор определяет взаимосвязь между погрешностью аппроксимации и производными сигнала датчиков, что удобно при расчетах. С учетом рекомендаций работы [1] и основываясь на выбранном критерии оценки интегральной среднеквадратической погрешности, запишем
 , (11)
, (11)
где ![]() - калибровочный коэффициент, зависящий от вида аппроксимации и степени p аппроксимирующего полинома;
- калибровочный коэффициент, зависящий от вида аппроксимации и степени p аппроксимирующего полинома; ![]() интервал аппроксимации. Для полинома нулевого порядка интегральная среднеквадратическая погрешность равна
интервал аппроксимации. Для полинома нулевого порядка интегральная среднеквадратическая погрешность равна
 , (12)
, (12)
а при ![]()
 . (13)
. (13)
Основные составляющие интервала аппроксимации следящего АЦП ![]() определяет
определяет
![]() , (14)
, (14)
где ![]() - время кодирования в счетчике АЦП;
- время кодирования в счетчике АЦП; ![]() - время кодирования одного разряда;
- время кодирования одного разряда; ![]() - время для принятия решения;
- время для принятия решения; ![]() ,
, ![]() ,
, ![]() - время прохождения, кодирования и декодирования информации в ЦАП. Воздействуя на указанные составляющие
- время прохождения, кодирования и декодирования информации в ЦАП. Воздействуя на указанные составляющие ![]() , можно добиться определенного уменьшения погрешности аппроксимации. Погрешность аппроксимации непосредственно связана со значением
, можно добиться определенного уменьшения погрешности аппроксимации. Погрешность аппроксимации непосредственно связана со значением ![]() и интервалом аппроксимации
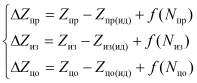
и интервалом аппроксимации ![]() . Интервал аппроксимации зависит от структуры АЦП, параметров, количества используемых технических средств (ЦАП, операционных усилителей и компараторов) и принятых алгоритмов обработки. Результаты измерений трех датчиков расхода, давления и температуры (
. Интервал аппроксимации зависит от структуры АЦП, параметров, количества используемых технических средств (ЦАП, операционных усилителей и компараторов) и принятых алгоритмов обработки. Результаты измерений трех датчиков расхода, давления и температуры (![]() ) вводятся через
) вводятся через ![]() в контроллер, где производятся вычисления функции коррекции
в контроллер, где производятся вычисления функции коррекции ![]() в соответствии
в соответствии
 (15)
(15)
где ![]() и
и ![]() - коэффициенты коррекции, стоящие соответственно перед
- коэффициенты коррекции, стоящие соответственно перед ![]() и
и ![]() ;
; ![]() - смещения нуля датчиков;
- смещения нуля датчиков; ![]() - изменение крутизны характеристик
- изменение крутизны характеристик ![]() ;
; ![]() - калибровочные температурные коэффициенты, устанавливаются контроллером в автоматическом режиме в зависимости от изменения окружающей среды.
- калибровочные температурные коэффициенты, устанавливаются контроллером в автоматическом режиме в зависимости от изменения окружающей среды.
На основе проведенных исследований разработан и изготовлен высокоточный быстродействующий расходомер массы с адаптивной коррекцией нелинейностей в датчиках расхода, давления и температуры. В лабораторных условиях разработанный расходомер массы при постоянном расходе обеспечивает погрешности измерения на уровне, не превышающем ± 0,05 % во всём диапазоне работы расходомера.
Рецензенты:
Ясовеев Васих Хаматович, д.т.н., профессор, заведующий кафедры «Информационно-измерительная техника» ФГБОУ ВПО «Уфимский государственный авиационный технический университет Министерства образования и науки РФ», г. Уфа.
Мунасыпов Рустэм Анварович, д.т.н., профессор кафедры «Техническая кибернетика» ФГБОУ ВПО «Уфимский государственный авиационный технический университет Министерства образования и науки РФ», г. Уфа.
Библиографическая ссылка
Хасанов З.М., Хасанова Н.В., Зяблицев П.А., Гирфатов М.А. ОЦЕНКА ВЛИЯНИЯ ПАРАМЕТРОВ СХЕМ АДАПТИВНОЙ ЛИНЕАРИЗАЦИИ НА ТОЧНОСТЬ РАСХОДОМЕРА МАССЫ ТОПЛИВА // Современные проблемы науки и образования. – 2012. – № 3. ;URL: https://science-education.ru/ru/article/view?id=6532 (дата обращения: 25.04.2024).