



На сегодняшний день не снижается интерес к возможности применения «тросовых» манипуляторов с параллельной кинематической структурой для задач перемещения различных грузов в пространстве, так как их структура может обладать повышенными технико-эксплуатационными показателями.
Известные структуры манипуляторов с гибкими нитями, такие как «RoboCrane» [5], предложенный Джеймсом Альбусом в NIST США, а также структура параллельного манипулятора с гибкими связями, рассмотренная в [2], способны обслуживать рабочую зону большого объема (более 1×106 м3) с повышенной энергоэффективностью при пониженной материалоемкости конструкции. Однако эффективность использования известных манипуляторов с гибкими нитями существенно снижается пропорционально высоте подъема груза, о чем свидетельствуют графики, полученные в [1], что вызвано резким увеличение сил натяжения в гибких нитях.
Цель исследования
В данной работе предлагаются структуры параллельных манипуляторов с гибкими нитями, позволяющие существенно снизить нагрузки на их звенья, что позволит увеличить грузоподъемность и снизить энергозатраты.
Материал и методы исследования
При проведении исследований использовались методы аналитической и элементарной геометрии, а также методы численного решения систем нелинейных уравнений.
Результаты исследования и их обсуждение
Для проведения сравнительного анализа структур параллельных манипуляторов с гибкими связями проанализируем манипулятор, рассмотренный в [3], кинематическая схема которого представлена на рис. 1.
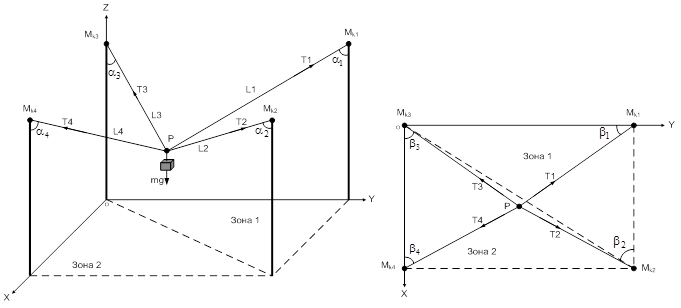
Рис. 1. Кинематическая схема манипулятора на основе гибких звеньев.
Как видно из рисунка 1, манипулятор состоит из четырех вертикальных колонн, установленных в точках ![]() ,
, ![]() ,
, ![]() ,
, ![]() , в которых укреплены одни из концов невесомых и нерастяжимых нитей, другие концы нитей соединены в точке P, перемещающейся в пространстве рабочей зоны манипулятора по заданной траектории. Под действием веса груза
, в которых укреплены одни из концов невесомых и нерастяжимых нитей, другие концы нитей соединены в точке P, перемещающейся в пространстве рабочей зоны манипулятора по заданной траектории. Под действием веса груза ![]() , закрепленного в точке P в нитях возникают силы натяжения T1, T2, T3, T4, причем в зоне 1 вес груза распределяется между первой, второй и третьей нитью, а в зоне 2 - между второй, третьей и четвертой нитью.
, закрепленного в точке P в нитях возникают силы натяжения T1, T2, T3, T4, причем в зоне 1 вес груза распределяется между первой, второй и третьей нитью, а в зоне 2 - между второй, третьей и четвертой нитью.
Силы натяжения в гибких нитях можно рассчитать путем решения систем нелинейных уравнений, полученных в [4], имеющих вид:
 (1)
(1)
 (2)
(2)
Коэффициенты при неизвестных (синусы и косинусы углов) рассчитываются методами элементарной геометрии и зависят от расположения точки P (груза) в пространстве рабочей зоны.
Для оценки эффективности работы манипулятора (рис. 1) в среде MatLab была разработана компьютерная модель, позволяющая графически представить зависимость максимального значения суммарной силы натяжения нитей при перемещении груза в плоскости ![]() от высоты подъема груза. В результате компьютерного моделирования при входных параметрах
от высоты подъема груза. В результате компьютерного моделирования при входных параметрах ![]() ,
, ![]() ,
, ![]() ,
,  ,
, ![]() было установлено, что при высоте подъема груза
было установлено, что при высоте подъема груза ![]() наблюдается существенный рост суммарного значения сил натяжения нитей, что требует увеличения запаса прочности нитей или ограничения зоны обслуживания по высоте.
наблюдается существенный рост суммарного значения сил натяжения нитей, что требует увеличения запаса прочности нитей или ограничения зоны обслуживания по высоте.
В тех случаях, когда необходимый запас прочности гибких нитей не может быть достигнут и требуется обслуживать максимальный объем рабочей зоны, структура «тросового» манипулятора может быть изменена путем увеличения высоты второй и третьей колонны. Сравнительный анализ двух структур манипуляторов представлен в виде графиков на рис. 2.
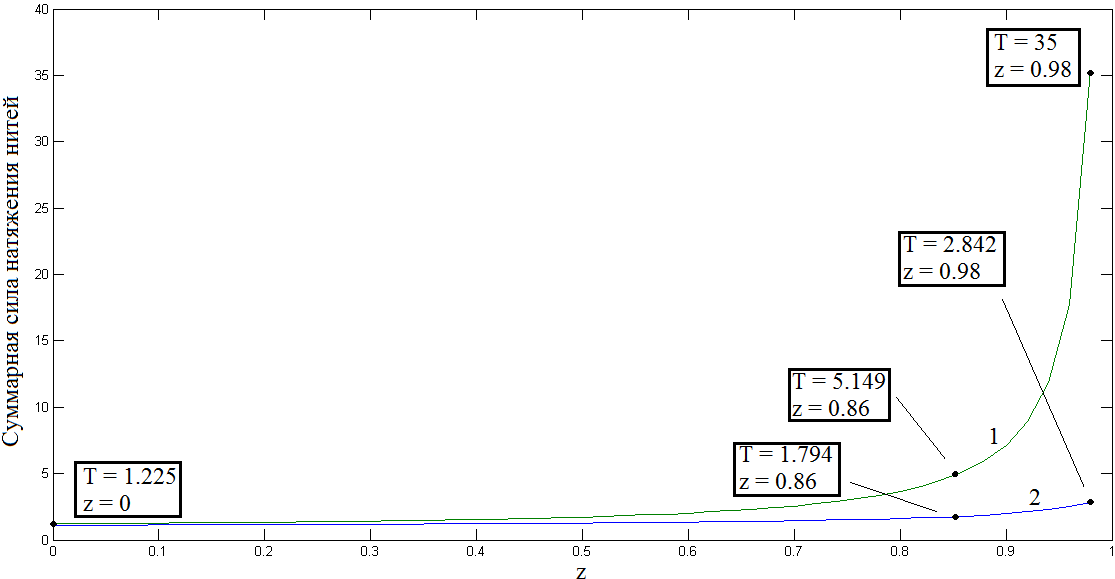
Рис. 2. Сравнительный анализ суммарных сил натяжения манипулятора с равной высотой колонн и манипулятора с увеличенной высотой двух колонн.
На графике (рис. 2) кривая 1 отражает зависимость суммарной силы натяжения нитей параллельного манипулятора с равной высотой колонн от высоты подъема груза, кривая 2 - манипулятора с увеличенной высотой второй и третьей колонны в 1,5 раза.
Как следует из графиков на рисунке 2, при несущественном увеличении (в 1,5 раза) высоты колонн, наблюдается существенное снижение суммарной силы натяжения нитей. При ![]() выигрыш в суммарной силе составляет более чем в 2,5 раза, а при
выигрыш в суммарной силе составляет более чем в 2,5 раза, а при ![]() - более чем в 12 раз.
- более чем в 12 раз.
Таким образом, в некоторых случаях существенно снизить нагрузку на звенья параллельного «тросового» манипулятора возможно путем увеличения высоты двух опорных колонн. Такая структурная модификация, в конечном итоге, приведет к снижению стоимости эксплуатации манипулятора за счет существенного снижения энергоемкости при небольшом увеличении материалоемкости конструкции.
Для достижения большей эффективности по сравнению с вышерассмотренными структурами предлагается манипулятор с шестью колоннами, кинематическая схема которого представлена на рис. 3.
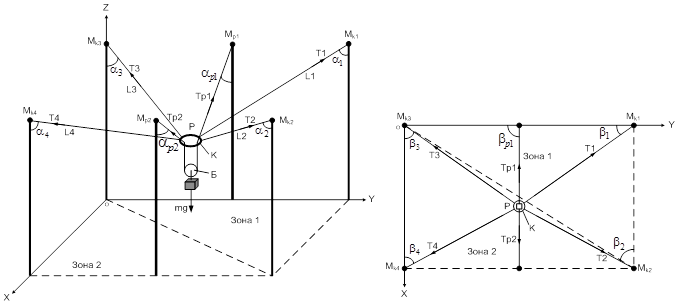
Рис. 3. Кинематическая схема параллельного манипулятора с шестью опорными колоннами.
Отличие манипулятора с шестью колоннами от манипулятора с четырьмя колоннами (рис. 1) состоит в том, что первая, вторая, третья и четвертая нити соединены с кольцом K (рис. 3) бесконечно малого размера, а также добавлены две колонны, установленные в точках ![]() ,
, ![]() , в которых укрепляется дополнительная нить, свободно проходящая через кольцо K и соединенная с объектом перемещения (грузом) посредством блока Б. Введенные элементы, такие как колонны, нить и блок, образуют известное устройство, называемое полиспастом, с помощью которого дополнительно осуществляется изменение высоты подъема груза.
, в которых укрепляется дополнительная нить, свободно проходящая через кольцо K и соединенная с объектом перемещения (грузом) посредством блока Б. Введенные элементы, такие как колонны, нить и блок, образуют известное устройство, называемое полиспастом, с помощью которого дополнительно осуществляется изменение высоты подъема груза.
Силы натяжения в основных нитях структуры манипулятора, представленной на рисунке 3, можно определить путем решения следующих систем нелинейных уравнений:
 , (3)
, (3)
(4)
Коэффициенты при неизвестных рассчитываются методами элементарной геометрии и зависят от расположения кольца К в пространстве рабочей зоны. Множитель ![]() определяет значение сил
определяет значение сил ![]() и
и  и не зависит от расположения кольца в зоне обслуживания манипулятора, что обеспечивает неизменную нагрузку на дополнительные колонны.
и не зависит от расположения кольца в зоне обслуживания манипулятора, что обеспечивает неизменную нагрузку на дополнительные колонны.
Сравнительный анализ значений суммарной силы натяжения нитей манипулятора с шестью колоннами и манипулятора с четырьмя колоннами отражает график на рис. 4.
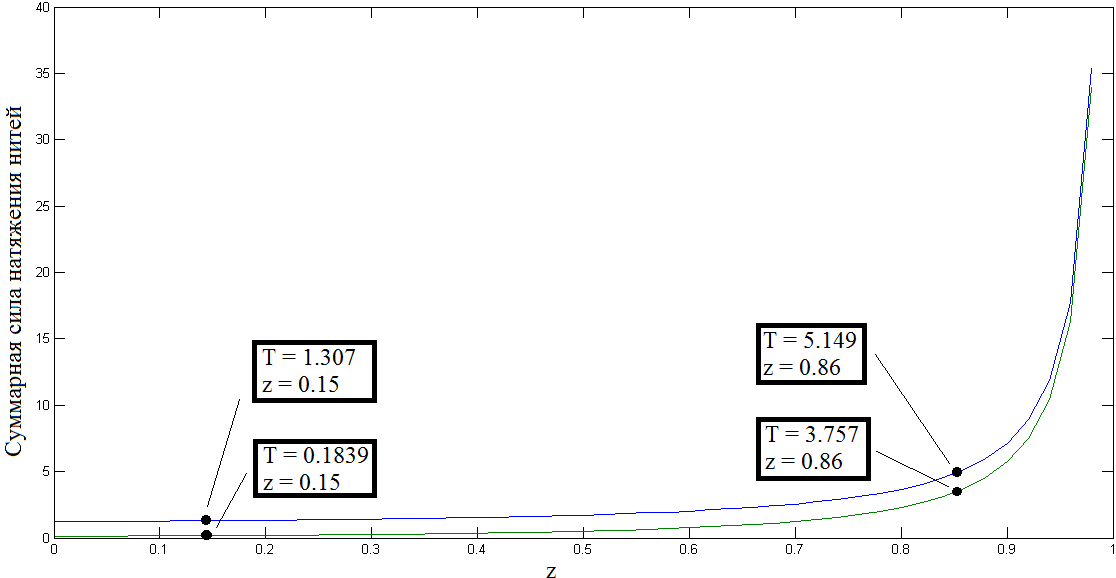
Рис. 4. Сравнительный анализ суммарных сил натяжения манипулятора с шестью колоннами и манипулятора с четырьмя колоннами.
Результат моделирования, представленный на рисунке 4, был получен при следующих входных параметрах компьютерной модели: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , mg=1.
, mg=1.
Как видно из графика на рисунке 4, введение кольца, блока, нити и дополнительных опорных колонн приводит к снижению суммарной силы натяжения основных нитей. Например, при ![]() выигрыш в суммарной силе в среднем равен 5, однако с увеличением высоты подъема груза преимущества структуры «тросового» манипулятора с шестью колоннами теряются.
выигрыш в суммарной силе в среднем равен 5, однако с увеличением высоты подъема груза преимущества структуры «тросового» манипулятора с шестью колоннами теряются.
Модифицируем структуру манипулятора с шестью колоннами путем увеличения (например, в 1,5 раза) высоты дополнительных колонн, установленных в точках ![]() ,
, ![]() , и сравним ее эффективность со структурой манипулятора с четырьмя колоннами, две из которых также в 1,5 раза выше остальных. Такой сравнительный анализ отражают графики, представленные на рис. 5.
, и сравним ее эффективность со структурой манипулятора с четырьмя колоннами, две из которых также в 1,5 раза выше остальных. Такой сравнительный анализ отражают графики, представленные на рис. 5.
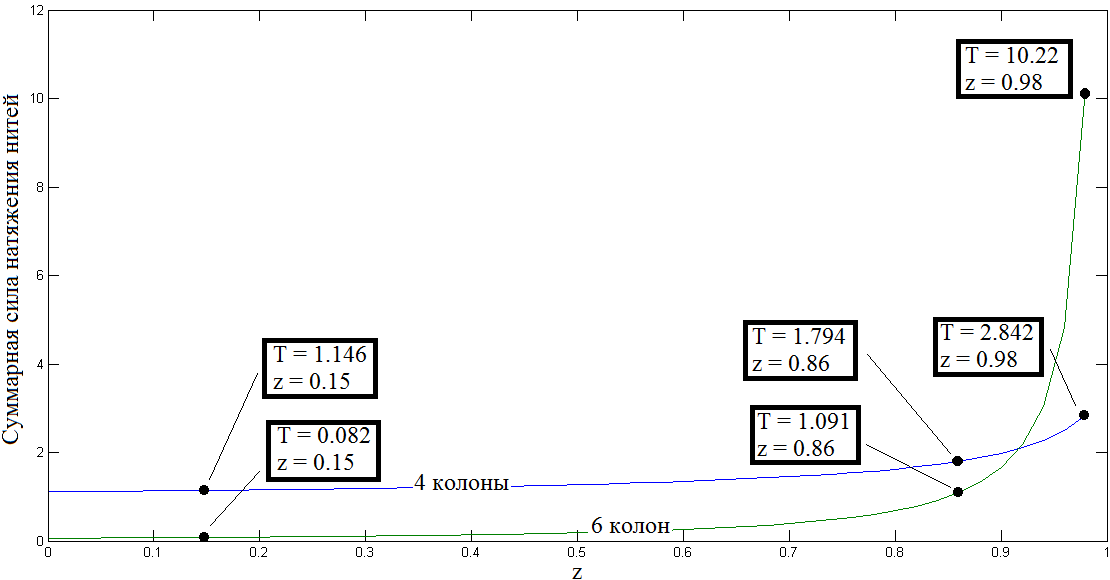
Рис. 5. Сравнительный анализ суммарных сил натяжения манипуляторов с шестью и четырьмя колоннами при неравной высоте колонн.
Результат моделирования, представленный на рисунке 5, был получен при тех же входных параметрах компьютерной модели, что и графики из рисунков 2, 4.
Как видно из графиков, изображенных на рисунке 5, при ![]() явное преимущество на стороне структуры с 6-ю колоннами (средний выигрыш в суммарной силе более 4,5 раза), однако при z > 0,86, структура с дополнительными колоннами оказывается менее эффективной, но в сравнении со структурой, рассмотренной в [3], обладает преимуществом более чем в 3 раза.
явное преимущество на стороне структуры с 6-ю колоннами (средний выигрыш в суммарной силе более 4,5 раза), однако при z > 0,86, структура с дополнительными колоннами оказывается менее эффективной, но в сравнении со структурой, рассмотренной в [3], обладает преимуществом более чем в 3 раза.
Выводы
Таким образом, с целью снижения энергоемкости (или повышения грузоподъемности) параллельного манипулятора с гибкими нитями его кинематическая структура может быть модифицирована путем увеличения высоты двух опорных колонн. В рамках данной работы доказано, что (при z ≥ 0,86) увеличение высоты двух опорных колонн в 1,5 раза приводит к выигрышу по суммарной силе более чем на порядок. Однако при ![]() существенного выигрыша не наблюдается. Снизить нагрузку (в несколько раз) на нити «тросового» манипулятора при
существенного выигрыша не наблюдается. Снизить нагрузку (в несколько раз) на нити «тросового» манипулятора при ![]() позволяет структура, представленная на рисунке 3, однако для такого манипулятора решение прямой задачи кинематики в зоне обслуживания зависит от распределения сил натяжения нитей в пространстве рабочей зоны манипулятора, что требует дополнительных исследований.
позволяет структура, представленная на рисунке 3, однако для такого манипулятора решение прямой задачи кинематики в зоне обслуживания зависит от распределения сил натяжения нитей в пространстве рабочей зоны манипулятора, что требует дополнительных исследований.
Рецензенты:
- Страданченко Сергей Георгиевич, доктор технических наук, профессор, проректор по заочному, дистанционному и дополнительному профессиональному образованию ФГБОУ ВПО «Южно-Российский государственный университет экономики и сервиса», г. Шахты.
- Привалов Александр Алексеевич, доктор технических наук, профессор, декан факультета непрерывного образования Шахтинского института (филиала) ФГБОУ ВПО «Южно-Российский государственный технический университет» (Новочеркасский политехнический институт), г. Шахты.
Библиографическая ссылка
Толстунов О.Г., Валюкевич Ю.А. ИССЛЕДОВАНИЕ И АНАЛИЗ ХАРАКТЕРИСТИК ПАРАЛЛЕЛЬНЫХ МАНИПУЛЯТОРОВ С ГИБКИМИ СВЯЗЯМИ // Современные проблемы науки и образования. – 2012. – № 4. ;URL: https://science-education.ru/ru/article/view?id=6868 (дата обращения: 20.04.2024).