



Процессы тонкого измельчения сопровождаются высоким расходом электроэнергии. Это объясняется трудоемкостью и энергоемкостью самого процесса измельчения, а также использованием в настоящее время размольного оборудования. Таким оборудованием в подавляющем большинстве являются вибрационные мельницы. В качестве привода таких машин выступают, как правило, дебалансные вибровозбудители с двигателями, а колебательная система состоит из рабочего органа (помольная камера) и пружин. При выполнении технологического процесса измельчения создается технологическая нагрузка на колебательную систему и привод. Если создаваемая нагрузкой сила сопротивления линейно зависит от кинематических параметров движения рабочего органа, то такая нагрузка называется линейной [8]. В ином случае – нелинейна [9].
Цель исследования
Целью данной работы является анализ энергетических затрат вибрационных мельниц и возможные пути по их снижению.
Материалы и методы
Как правило, дебалансный привод (рис. 1) используется в режиме вынужденных колебаний с далеко зарезонансной частотой. В таком диапазоне частот рабочий режим колебаний машины слабо чувствителен к изменению технологической нагрузки и практически не зависит от нелинейности ее колебательной системы.
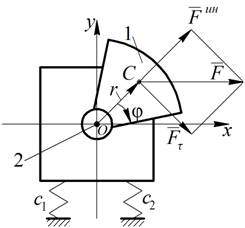
Рис. 1. Центробежный (дебалансный) вибровозбудитель
1 – дебаланс; 2 – ось вращения
Но такая настройка ведет к нерациональному использованию энергии, так как в колебательной системе циркулирует большая реактивная мощность, необходимая для преодоления инерционных и упругих сил [1, 10]. Вследствие этого возрастает энергопотребление привода, увеличиваются его габариты, что приводит к снижению эффективности и надежности машины в целом. Кроме этого, такие машины теряют часть полезной мощности в подшипниковых узлах. Так, согласно [6, 7], расход энергии на трение в подшипниках центробежного вибровозбудителя
![]() , (1)
, (1)
где f=0,004÷0,007 – коэффициент трения в подшипниках; F=mlω2 – центробежная сила, развиваемая дебалансом, статический момент которого равен ml, d – диаметр вала под подшипником; ω – угловая скорость вращения дебаланса. Величина возмущающей силы, создаваемой дебалансом, пропорциональна квадрату его угловой скорости. Таким образом, для получения достаточной возмущающей силы при низкой скорости вращения вала, что требуют тенденции развития вибрационных мельниц, приходится утяжелять дебаланс. В результате дебаланс получается тяжелым и громоздким. Такое обстоятельство нагружает подшипники, что приводит к их недостаточной долговечности и вынуждает применять двигатели большей мощности. В связи с этим вибрационные мельницы требуют совершенствования на основе разработки новых эффективных и надёжных приводов.
Такая задача решается при помощи полученных перспективных результатов [1, 3] энергетической эффективности параметрически возбуждаемой вибрационной машины. Применение резонансного параметрического привода позволяет получить колебания той же интенсивности, используя при этом двигатель меньшей мощности. Такое обстоятельство объясняется особенностью комбинационного параметрического резонанса [4]. При настройке ν=0,25 (коэффициент собственной частоты колебаний осцилляторов) частота вращения “невидимого дебаланса” (общего центра масс осцилляторов) близка к собственной частоте колебаний рабочего органа ω2=0,75ω≈λ2 и ниже частоты вращения ИЭ на 25%. Тогда не составляет труда заметить, что мощность, рассеиваемая в подшипниковых узлах параметрического привода, более чем в два раза меньше по сравнению с центробежным приводом. Помимо этого, резонансная настройка параметрического привода позволяет снизить значение статического момента общей массы осцилляторов [1]. Уменьшение статического момента повышает долговечность подшипников привода и приводит к снижению энергоемкости мельницы.
Еще одной важной особенностью снижения энергопотребления вибрационных мельниц путем использования параметрического резонансного привода является его приспособленность к эффектам самоорганизации [5] и самосинхронизации [2].
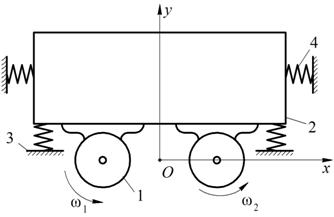
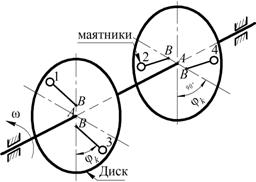
Рис. 2. Динамическая модель вибрационного параметрического устройства
Два одинаковых параметрических вибровозбудителя 1 симметрично установлены на рабочем органе 2 вращающихся в одинаковых направлениях. Несущее тело соединено с неподвижным основанием 3 упругими связями 4, обеспечивающими возможность поступательного перемещения рабочего органа по любым направлениям плоскости, задаваемой осями x, y.
Сначала рассмотрим раздельную работу параметрических вибровозбудителей. Пусть ротор ИЭ, например, левого вибровозбудителя, вращается равномерно с угловой скоростью ω1. Равномерное вращение ротора порождает периодическое изменение во времени инертных свойств колебательной системы с периодом 2π/ω. При этом тела качения образуют подсистему N одинаковых осцилляторов качения (маятников) с осями обкатки в центрах кривизны беговых дорожек и одинаковыми парциальными собственными частотами ![]() во вращающейся вместе с ротором системе координат. Вторая подсистема – это рабочий орган на упругой изотропной подвеске с парциальной собственной частотой
во вращающейся вместе с ротором системе координат. Вторая подсистема – это рабочий орган на упругой изотропной подвеске с парциальной собственной частотой ![]() . При настройке
. При настройке ![]() , ν=0,25 и выполнении порогового условия
, ν=0,25 и выполнении порогового условия ![]() самовозбуждается многократный комбинационный параметрический резонанс с возникновением коллективного взаимодействия указанных выше подсистем.
самовозбуждается многократный комбинационный параметрический резонанс с возникновением коллективного взаимодействия указанных выше подсистем.
Колебательная система вибромашины синхронизируется на частотах ![]() где
где ![]()
![]() некратные частоты генерации, причем осцилляторы качения в первом приближении совершают когерентные колебания по закону
некратные частоты генерации, причем осцилляторы качения в первом приближении совершают когерентные колебания по закону ![]() k =1, 2,…, N. Вследствие синхронизации осцилляторов качения по типу колеблющихся маятников (феномен Гюйгенса) центр масс подсистемы осцилляторов качения обращается вокруг оси z (приводного вала) с частотой Ω2, описывая окружность в плоскости вращения ИЭ. Поскольку Ω2≈λ2, то неуравновешенная центробежная сила инерции будет возбуждать резонансные колебания несущего тела, которые, в свою очередь, вызывают резонансные колебания осцилляторов качения.
k =1, 2,…, N. Вследствие синхронизации осцилляторов качения по типу колеблющихся маятников (феномен Гюйгенса) центр масс подсистемы осцилляторов качения обращается вокруг оси z (приводного вала) с частотой Ω2, описывая окружность в плоскости вращения ИЭ. Поскольку Ω2≈λ2, то неуравновешенная центробежная сила инерции будет возбуждать резонансные колебания несущего тела, которые, в свою очередь, вызывают резонансные колебания осцилляторов качения.
Таким образом, автоматически (то есть само собой в силу свойств самой системы, а не за счет технических устройств автоматической настройки) образуется “невидимый дебаланс”, который вращается с угловой скоростью ![]() , тогда как ротор ИЭ вращается с угловой скоростью ω1. При ν=0,25
, тогда как ротор ИЭ вращается с угловой скоростью ω1. При ν=0,25 ![]() на 25% ниже угловой скорости ω1. Самосинхронизация маятников ИЭ по Гюйгенсу автоматически компенсирует погрешности изготовления роторно-маятниковой системы, тем самым не ужесточая конструкторско-технологические требования её изготовления.
на 25% ниже угловой скорости ω1. Самосинхронизация маятников ИЭ по Гюйгенсу автоматически компенсирует погрешности изготовления роторно-маятниковой системы, тем самым не ужесточая конструкторско-технологические требования её изготовления.
Рассматривая равномерное вращение ротора ИЭ правого вибровозбудителя с угловой скоростью ω2, достаточно близкой к ω1, приходим к образованию второго “невидимого дебаланса”, который вращается с угловой скоростью ![]() .
.
При совместной работе параметрических вибровозбудителей с близкими парциальными угловыми скоростями ω1, ω2 осуществляется их самосинхронизация по типу неуравновешенных роторов. В результате устанавливается синхронный режим, при котором общий центр масс качающихся маятников ИЭ (“невидимый дебаланс”) каждого из вибровозбудителей вращается вокруг их осей с одинаковой угловой скоростью ![]() в одинаковых направлениях, сообщая несущему телу поступательные круговые колебания, тогда как угловые скорости самих роторов могут быть различными. Синхронный режим вращения “невидимых дебалансов” обеспечивает рабочий орган.
в одинаковых направлениях, сообщая несущему телу поступательные круговые колебания, тогда как угловые скорости самих роторов могут быть различными. Синхронный режим вращения “невидимых дебалансов” обеспечивает рабочий орган.
При совместной работе вибровозбудителей настройка колебательной системы на резонансные колебания приобретает вид ![]() ν=0,25, N≥4, где
ν=0,25, N≥4, где ![]() усредненное значение угловых скоростей вибровозбудителей,
усредненное значение угловых скоростей вибровозбудителей, ![]() ,
, ![]() Резонансные частоты удовлетворяют соотношению
Резонансные частоты удовлетворяют соотношению ![]() где
где ![]() частоты вращения роторов вибровозбудителей;
частоты вращения роторов вибровозбудителей; ![]() частоты генерации маятников ИЭ вибровозбудителей.
частоты генерации маятников ИЭ вибровозбудителей.
Рабочий орган синхронизирует качания маятников вибровозбудителей так, что их центры масс обращаются вокруг осей вращения роторов с одинаковой частотой Ω2. В результате одновременно реализуется самосинхронизация колеблющихся тел типа маятников и вращающихся тел типа неуравновешенных роторов [2]. Согласованная работа вибровозбудителей достигается самой системой без вмешательства извне и проявляется как результат процесса её самосинхронизации и самоорганизации. В процессе самоорганизации вибрационное устройство приобретает элементы технического интеллекта [5].
На практике часто используются вибрационные мельницы с протяженным рабочим органом, возбуждаемые одним мощным вибровозбудителем. Вследствие этого, движение такой машины носит характер интенсивных упругих колебаний или их еще называют “паразитными”. Такие колебания повышают энергопотребление, искажают форму заданного движения рабочего органа технологической машины. Поэтому, еще одним шагом на пути снижения энергозатрат в вибрационных мельницах, является исключения “паразитных” колебаний за счёт эффекта самосинхронизации [2, 9]. Для этого рекомендуется использовать вместо одного мощного несколько маломощных самосинхронизирующихся вибровозбудителей [2, 6].
Вибрационный резонансный параметрический привод обладает способностью к самоорганизации, в основе которой лежат три основополагающих принципа [5] – принцип резонанса и два принципа обратных связей: положительная обратная связь, которая приводит к росту колебаний; отрицательная обратная связь, ограничивающая рост. Рабочий орган своими малыми “затравочными” колебаниями синхронизирует и когерентно раскачивает маятники ИЭ, которые в последующем движении своим коллективным резонансным воздействием на рабочий орган увеличивают размах его колебаний (рабочий орган раскачивает сам себя).
Результаты и их обсуждение
Анализ энергозатрат вибрационных мельниц показывает, что большие затраты энергии не гарантируют реализации пропорционального им результата. Приводной двигатель при запуске такого привода преодолевает, в основном, момент сил трения в подшипниках, разгоняясь практически в режиме холостого хода. Поэтому необходимость учета пусковых нагрузок отпадает. Уменьшение статического момента повышает долговечность подшипников привода и приводит к снижению энергоемкости мельницы.
Заключение
Таким образом, резонансный параметрический привод можно рассматривать как центробежный. Однако, в отличие от центробежного привода параметрический привод является приводом нового типа, в котором энергия вращения ИЭ более эффективно преобразуется в энергию механических колебаний рабочего органа, в результате чего повышается эффективность работы машины, приобретаются новые свойства. Целесообразными предложениями по снижению энергозатрат вибрационных мельниц является использование параметрического резонансного привода. Его применение позволяет снизить не только потребляемую мощность двигателя, но повысить надежность и эффективность машины в целом.
Рецензенты:
Панов А.Ю., д.т.н., заведующий кафедрой «Теоретическая и прикладная механика», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.
Кабалдин Ю.Г., д.т.н., кафедры «Технология и оборудование машиностроения», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.