



Для расчета подвижности [2-5], проходимости [1] и поворачиваемости (маневренности) гусеничных двухзвенных гусеничных машин, а также для определения нагруженности их конструкции необходимо знать силы, возникающие при повороте. Определить их можно из кинематического и силового анализа.
Для анализа сил, действующих на сочлененные двухзвенные гусеничные машины при совершении маневра «поворот», необходимо знать основные параметры машины, а также задаться коэффициентом сопротивления качению f и коэффициентом сцепления в боковом направлении φy.
Кинематическая схема поворота сочлененной гусеничной машины показа на рис.1.
На схеме изображены основные размеры, необходимые для определения сил, действующих в гидроцилиндрах. Сделано предположение, что центры масс звеньев гусеничной машины находятся посередине базы.
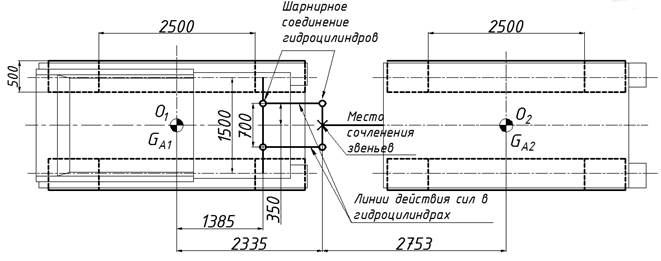
Рис.1. Кинематическая схема поворота
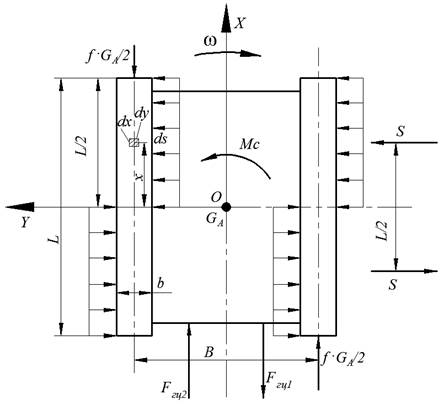
Расчетная схема для определения сил сопротивления повороту представлена на рис. 2.
![]()
Рис. 2. Внешние силы, действующие на звено машины при повороте
Наиболее объективным (на наш взгляд) критерием для оценки действия гусеницы на грунт является пиковое давление [10]:
![]() (1)
(1)
где среднее давление:
![]()
![]() – коэффициент динамичности, зависящий в основном от типа гусеницы и скорости движения; он изменяется в пределах: для гусениц с ОМШ 2,8-3,6; для гусениц с РМШ; 2,3-2,8; для гусениц с повышенной обратной жесткостью 1,5-2,4; Ga – вес машины(Н); b – ширина гусеницы (м), размер Li(м) соответствует базе машины.
– коэффициент динамичности, зависящий в основном от типа гусеницы и скорости движения; он изменяется в пределах: для гусениц с ОМШ 2,8-3,6; для гусениц с РМШ; 2,3-2,8; для гусениц с повышенной обратной жесткостью 1,5-2,4; Ga – вес машины(Н); b – ширина гусеницы (м), размер Li(м) соответствует базе машины.
Будем считать, что к каждой гусенице приложена сила сопротивления прямолинейному движению ![]() , где GА – вес транспортного средства и поперечные силы S, препятствующие повороту и образующие момент сопротивления повороту Mc. На корпус машины со стороны гидроцилиндров действуют силы Fгц1 и Fгц2. Предположим также, что распределение давления по длине и ширине гусениц равномерное.
, где GА – вес транспортного средства и поперечные силы S, препятствующие повороту и образующие момент сопротивления повороту Mc. На корпус машины со стороны гидроцилиндров действуют силы Fгц1 и Fгц2. Предположим также, что распределение давления по длине и ширине гусениц равномерное.
Для определения момента сопротивления повороту Мс в общем случае с учетом ширины гусениц выделим элементарную площадку на опорной плоскости со сторонами dx и dy. Тогда элементарная касательная сила, действующая на эту площадку со стороны грунта [6]:
![]() (2)
(2)
а момент сопротивления повороту:
![]() (3)
(3)
Учитывая формулу (1), получим после интегрирования
![]() (4)
(4)
Момент сопротивления для ведущего звена:
![]()
Момент сопротивления для ведомого звена:
![]()
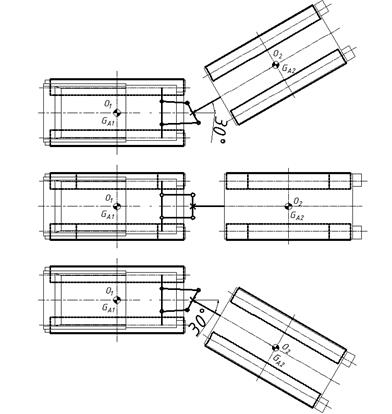
Рис. 3. Максимальные углы складывания в горизонтальной плоскости
Расставим силы, действующие на гусеничную машину при повороте.
Со стороны дороги на звенья гусеничной машины действуют:
1. Момент сопротивления повороту Мс, направленный против вращения звена.
2. На каждую из гусениц действует сила сопротивления качению, создавая пару сил, направленную в ту же сторону, что и момент сопротивления повороту.
Также на корпус звена действуют силы со стороны гидроцилиндров.
Если рассматривать вместе два звена гусеничной машины, то силы, действующие со стороны гидроцилиндров на звенья машины, являются внутренними.
В таком случае будем рассматривать поворот звеньев машины отдельно, т. е при рассмотрении поворота ведущего звена заменим ведомое звено силами, действующими на гидроцилиндры. Аналогично для ведомого звена.
На рис. 5 и 6 показаны кинематические схемы поворота ведущего и ведомого звеньев гусеничной машины.
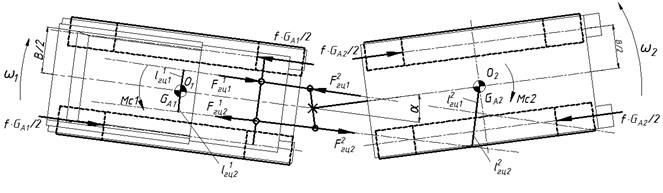
Рис. 4. Силы, действующие на звенья машины при складывании в горизонтальной плоскости
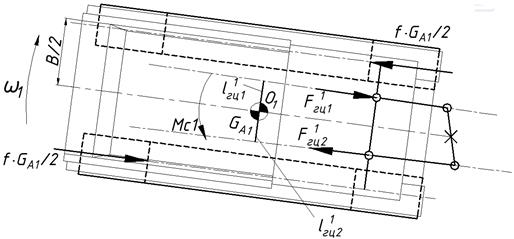
Рис. 5. Поворот ведущего звена сочлененной машины
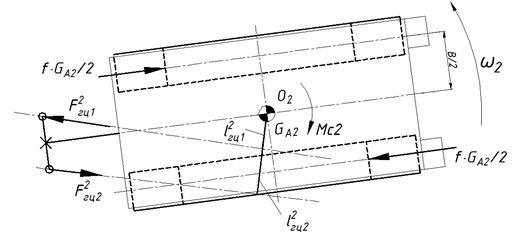
Рис. 6. Поворот ведомого звена сочлененной машины
Чтобы определить силы, действующие в гидроцилиндрах, рассмотрим равновесие ведущего звена гусеничной машины под действием сил сопротивления повороту относительно центра масс звена.
Уравнение моментов, относительно центра масс ведущего звена
![]() , (5)
, (5)
Т.к. F1=F2=F получим:
![]()
![]()
![]() , (6)
, (6)
В формуле (5) направление действия сил F1 и F2, а также плечи сил ![]() и
и ![]() получены путем геометрических построений.
получены путем геометрических построений.
При различных углах между звеньями машины линии действия сил относительно центра масс будет непрерывно меняться, соответственно и плечи сил будут меняться.
Таким образом, будет наблюдаться зависимость силы в гидроцилиндре от угла складывания звеньев в горизонтальной плоскости.
Аналогичная процедура поведена и для ведомого звена.
После проведения расчета сил действующих на звенья гусеничной машины при углах от нуля до 30 градусов были получены графики зависимости силы на гидроцилиндрах в зависимости от угла складывания звеньев машины.
Данные силы получены при условии, что звенья сочлененной гусеничной машины поворачиваются отдельно, т.е. получены силы, которые при данном угле складывания могут преодолеть момент сопротивления повороту звена гусеничной машины.
Если рассматривать сочлененное транспортное средство, то одно звено поворачивается относительно другого, т.е. для осуществления складывания необходимо приложить к гидроцилиндру такую силу, чтобы повернулось одно из звеньев.
Другими словами, для складывания на определенный угол (от 0°до 30°) необходимо приложить к гидроцилиндру минимальную из двух полученных сил (для данного угла складывания) для ведущего и ведомого звена.
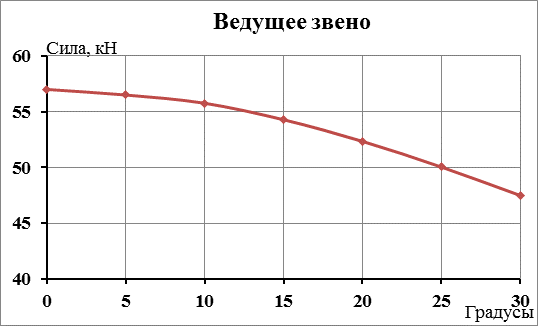
Рис. 7. График зависимости силы на гидроцилиндре от угла складывания ведущего звена
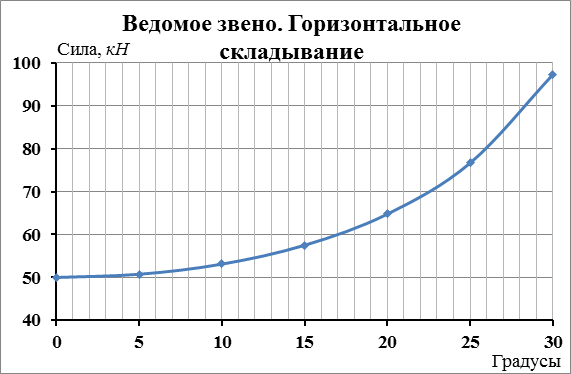
Рис. 8. График зависимости силы на гидроцилиндре от угла складывания ведомого звена
Проведен кинематический и силовой анализ, позволяющий определить силы, возникающие при повороте, необходимые для расчета подвижности [9], проходимости [7, 8] и поворачиваемости (маневренности) гусеничных двухзвенных гусеничных машин, а также для определения нагруженности их конструкции.
Рецензенты:
Беляков В.В., д.т.н., профессор кафедры «Автомобили и тракторы» «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.
Молев Ю.И., д.т.н., профессор кафедры «Строительные и дорожные машины» «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.