



Анализ перспективных технологий управления навигационными космическими аппаратами (НКА) показал, что в настоящее время большое значение уделяется повышению уровня автономности их функционирования. Повышение уровня автономности требует переноса части функций наземного комплекса управления на борт НКА. В первую очередь это касается задачи контроля технического состояния и проверки правильности функционирования бортового оборудования.
Структура процесса контроля включает накопление и обобщение априорной информации об объекте, получения измерительной информации, что является наиболее динамичным фактором, и ее анализ с последующим принятием решения [6]. Поэтому перенос задачи контроля на борт НКА предъявляет повышенные требования к этапу получения измерительной информации. Этап получения измерительной информации реализуется бортовой измерительной системой (БИС). Особенностью применения НКА является постоянная изменчивость условий функционирования, что для БИС находит свое отражение в изменении измерительной обстановки, в условиях которой решается задача измерений контролируемых параметров. Под изменением измерительной обстановки будем понимать изменение условий измерений, которые приводят к появлению дополнительных погрешностей или выход из строя отдельных элементов БИС и невозможность решения измерительной задачи выбранным методом.
В связи с этим представляется, что БИС в составе перспективной БСК следует наделить способностью парировать возникающие неопределенности путем собственной перестройки, то есть БИС должна обладать свойством адаптации. При этом адаптация может быть реализована посредством изменения как состава измеряемых параметров, так и их методов измерений, количества измерений, методов обработки измерительной информации и т.д. Особый интерес для реализации адаптивных БИС НКА представляет измерительное программирование [5]. На практике это комплекс аппаратных средств: система первичных измерительных преобразователей; система коммутации и сбора измерительной информации, система вычислительных средств, а также комплекс программно-математического обеспечения (ПМО) бортовых измерений. Используя свойство «гибкости» ПМО, представляется возможным наделить ныне существующие БИС свойством модификации структуры в соответствии с изменяющимися условиями измерительной обстановки и задачами без внесения технических изменений в структуру НКА.
Процесс модификации структуры БИС должен быть управляем и не должен носить хаотичный характер. В связи с этим возникает необходимость в создании интеллектуальной надстройки БИС, в функциях которой были бы заложены процедуры адаптивного управления, позволяющие программно парировать возникающие неопределенности [7, 9]. Вследствие этого, представляется актуальной разработка методического аппарата, позволяющего реализовать БИС, обладающие свойством адаптации к условиям измерительной обстановки [1, 8, 2, 4].
Таким образом, будем рассматривать БИС НКА как совокупность программно-технических средств, реализующих определенные технологии измерения контролируемых параметров для решения измерительных задач.
Рассмотрим содержание технологии измерения. Для этого проанализируем типичный пример измерения значения контролируемого параметра методом непосредственной оценки (рис.1).
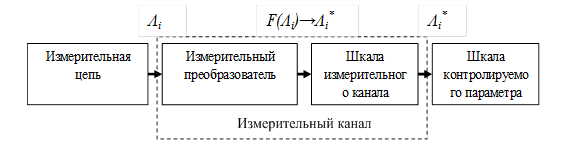
Рис.1. Структура измерительного канала
Оценка контролируемого параметра производится непосредственно по отчетному устройству и используется наблюдателем для принятия решения.
Функцию преобразования F(Λ)→Λ* реализует измерительный канал (ИК), в БИС. Алгоритм измерения А(λ) включает в себя производство измерения и отсчет одного измерения N=1.
Тогда структура технологии измерения будет представлена в виде:
LТ=<λi; f(λi), А(λi)> (1)
Однако для измерения рассматриваемого параметра (физической величины) может быть применена и иная технология получения оценки результата измерения (РИ) (рис. 2).
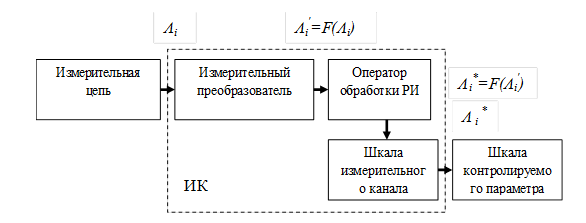
Рис. 2. Структура измерительного канала
По сравнению с предыдущей технологией к структуре добавится математическая модель функции преобразования сигнала измерительной информации, представленного массивом данных λi', для получения оценки результата измерения. Эта модель может быть исполнена программно, в вычислительном устройстве БИС НКА. Изменится алгоритм измерения А'(λ), который будет содержать не одно, а целую серию наблюдений и дополнительные операции, связанные с вычислением среднего λi* , реализуемые в расчетном устройстве ИК.
Тогда структура технологии измерения данного параметра изменится:
LТ=<λi; f(λi); f(λi'), А'(λ)> (2)
Допустим, что в силу каких-либо обстоятельств, предложенные технологии не могут быть реализованы на борту НКА. Тогда существует другой метод получения оценки контролируемого параметра, позволяющий косвенным путем получить результат измерения. Этот метод основывается на измерении других значений физических величин, являющихся аргументами функции, а искомая величина рассчитывается в соответствии с функциональной зависимостью λ*i=f(λ*u, λ*R) (рис. 3).
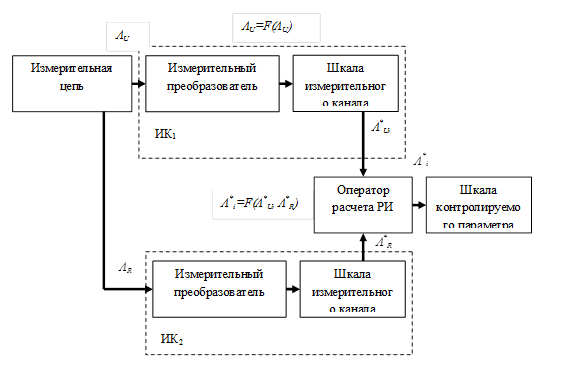
Рис. 3. Структура сложного измерительного канала
Соответствующим образом технология измерения и погрешность для получения (например, значения тока потребляемого нагрузкой) оценки результатов измерений представленным методом будут отличны от предыдущих.
LТ=<λ*i, λu; f(λu); λ R;f(λR);f(λ*u, λ*R); А"(λ)>, (3)
где f(λ*u, λ*R) – функция получения результата измерения.
Для реализации данной технологии будет применяться структура сложного измерительного канала и совершенно другой алгоритм проведения измерений А"(λ), который позволяет поэтапно измерить значения аргументов функции, а потом выполнить необходимые вычисления для нахождения результата измеряемого параметра.
С использованием косвенного метода технология может быть реализована без измерения значения второго аргумента. Для её реализации могут быть привлечены дополнительные сведения, допустим, из базы данных, о значении второго аргумента (например, сведение [δ0 (λR ;γR); µ,] о значении образцовой нагрузки, где λR= λ*R номинальное значение параметра, γR интервал возможных значений параметра, µ достоверность сведения) [5].
Измерительный процесс будет построен следующим образом (рис. 4).
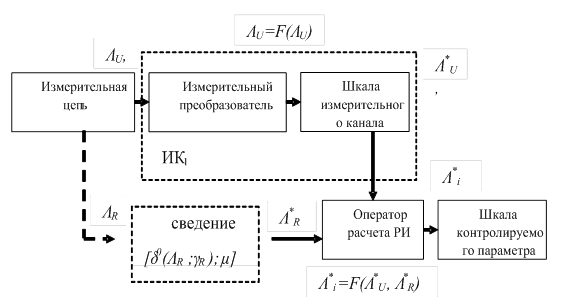
Рис. 4. Структура сложного измерительного канала
Вместо второго средства измерения применяется сведение [δ0(λR;γR); µ], в котором содержится информация о значении измеряемого параметра. Следовательно, в структуре сложного измерительного канала произойдут изменения, соответствующим образом изменится структура технологии измерения:
LТ=<λ*i, λu; f(λu); λ R;[ δ0(λR ;γR); µ];f(λ*u, λ*R); А(λ)> (4)
Характерной особенностью погрешности результата измерения (РИ) ∆λ является то, что в ней могут быть три основные составляющие – это погрешность метода измерения ∆м, погрешность средства измерения (измерительного канала БИС) ∆ИК БИС и погрешность наблюдателя (для системы принятия решения, погрешность округления ∆окр).
∆λ=∆м +∆ ИК БИС +∆окр, (5)
Помимо основной погрешности ∆осн у канала измерения присутствует дополнительная погрешность ∆доп. Эта погрешность возникает при отклонении условий измерений от нормальных, из-за воздействия неблагоприятных факторов на элементы канала измерения. Характер её проявления, как правило, постоянный или переменный систематический, в ряде случаев эта погрешность может приобретать случайную составляющую [4].
Таким образом, выражение для погрешности канала измерения будет выглядеть следующим образом: ∆ИКБИС=∆осн+∆доп, а погрешность результата измерения ∆λ=∆м +[∆осн+∆доп]+∆окр.
Технологии измерения обладают качественной определенностью: информативностью, достоверностью и оперативностью. Будем рассматривать достоверность как свойство технологии измерения обеспечивать потребителя объективной информацией. Показателем достоверности является вероятностная мера, характеризующая степень уверенности в том, что истинное значение измеряемой величины и результат измерения находятся в рамках одного интервала неопределенности ∆λ.
Pд{ΛÌ[λ*+∆λ; λ*-∆λ]}=a, (6)
где число aÌ[0;1], Pд доверительная вероятность, Λ-истинное значение, λ* – результат измерения, ∆λ – интервал неопределенности.
Под информативностью будем понимать свойство технологии измерения обеспечивать потребителя требуемым количеством информации. Показателем информативности является количество информации, полученное в результате измерения:
JLТ =ln(L/∆λ) (7)
где ∆λ – погрешность измерения, L – длина шкалы контролируемого параметра, как правило, соответствует допусковому интервалу [8, 3].
Обеспечение заданного качества технологии измерений, то есть требуемых информативности, достоверности и оперативности, в условиях возможных изменений измерительной обстановки требует решения задачи адаптации БИС.
Исследование проведено при поддержке Министерства образования и науки Российской Федерации, соглашение 14В37.21.2067
Рецензенты:
Звездина Марина Юрьевна, доктор физико-математических наук, доцент, заведующая кафедрой "Радиоэлектроника", Минобрнауки России, Ростовский технологический институт сервиса и туризма (филиал) Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Южно-Российский государственный университет экономики и сервиса», г. Ростов-на-Дону.
Мищенко Сергей Евгеньевич, доктор технических наук, профессор, профессор кафедры "Радиоэлектроника", Минобрнауки России, Ростовский технологический институт сервиса и туризма (филиал) Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Южно-Российский государственный университет экономики и сервиса», г. Ростов-на-Дону.