



Введение
Поволжский государственный технологический университет по заказам ряда промышленных организаций, связанных с выполнением транспортных и транспортно-технологических работ в районах со слаборазвитой дорожной сетью (предприятия нефтяной и газовой промышленности, энергетики, рыбного хозяйства и др.) проводит работы по созданию экологически безопасных амфибийных транспортных машин, способных круглогодично эксплуатироваться в условиях бездорожья.
За последние годы в университете по заказам рыбопромышленных предприятий каспийского бассейна был разработан, изготовлен и испытан ряд моделей амфибийных машин с аэродинамическими движителями типа «Каспий». Эти машины предназначены для выполнения грузопассажирских перевозок в зимнее время на Северном Каспии и могут быть также использованы на других замерзающих внутренних водоемах, реках, прибрежных участках морей (Белом море, озере Байкал и др.). Одна из таких моделей – транспортная амфибия с аэродинамическим движителем «Каспий-2» была принята к серийному производству, изготавливалась в объеме установочных серий и эксплуатировалась при подледном лове рыбы и промысле тюленей на Северном Каспии.
В зимний период поверхность этого моря покрыта непрочным льдом, имеющим значительное количество трещин и промоин, характеризуется большими участками битого льда с водой и участками открытой воды, мелководьем. В таких условиях ни один из традиционных наземных или водных видов транспорта работать не может. Указанные чрезвычайно сложные условия эксплуатации обусловили большую техническую сложность создания амфибии «Каспий-2».
Цель исследования
Оптимизация рабочих параметров амфибийной транспортной машины с аэродинамическим движителем «Каспий-2», обеспечивающих минимальные энергозатраты при эксплуатации в наиболее сложном режиме движения – выходе полностью груженой машины на лед.
Материал и методы исследования
Одним из самых характерных и наиболее сложных режимов движения амфибии «Каспий-2» является ее выход в груженом состоянии из воды на лед (рис. 1). Этим режимом фактически определяются основные характеристики аэродинамического движителя амфибии – установленная мощность двигателя и величина максимального тягового усилия, развиваемого воздушным винтом. От указанных параметров напрямую зависит топливно-энергетическая экономичность машины.

Рис. 1. Выход амфибии «Каспий-2» из воды на лед в условиях Северного Каспия.
Характер режима выхода амфибии из воды на лед определяется рядом факторов, среди которых можно выделить следующие.
1. Постоянные факторы: вес машины, положение ее центра тяжести и тягового винта, мощность двигателя, форма контура продольного профиля и др.
2. Случайные факторы: высота ступеньки и состояние льда, величина и направление вектора скорости машины при подходе к ступеньке, погодные условия (скорость и направление ветра, высота и направление волн, температура воздуха и состояние льда), скорость движения амфибии и угол тангажа при подходе к кромке льда и др.
Многообразие указанных факторов обусловило введение следующих допущений.
1. Направление вектора скорости амфибии перпендикулярно к кромке льда.
2. Движение амфибии происходит в безветренную погоду;
3. Амфибия имеет общую вертикальную продольную плоскость геометрической и массовой симметрии, совпадающую с направлением движения.
4. Упругие деформации тела амфибии и кромки льда винта пренебрежимо малы.
5. Влияние гироскопического момента воздушного винта пренебрежимо мало.
6. Сила сопротивления скольжению в точке контакта с кромкой льда пропорциональна силе нормального давления.
Согласно этим допущениям считаем движение амфибии плоским, параллельным вертикальной продольной плоскости его геометрической и массовой симметрии.
Расчетная схема процесса выхода амфибии на лед представлена на рисунке 2.
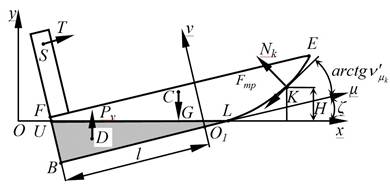
Рис. 2. Расчетная схема процесса выхода амфибии на лед.
Силы, действующие на амфибию:![]() сила тяжести
сила тяжести ![]() (приложена в центре масс C), где
(приложена в центре масс C), где ![]() – масса амфибии,
– масса амфибии, ![]() ; сила тяги винта T (приложена в точке S); нормальная реакция
; сила тяги винта T (приложена в точке S); нормальная реакция ![]() (приложена в точке K); сила трения
(приложена в точке K); сила трения ![]() , где f – коэффициент трения скольжения; выталкивающая сила
, где f – коэффициент трения скольжения; выталкивающая сила ![]() , где:
, где: ![]() – удельный вес воды,
– удельный вес воды, ![]() – объём погруженной части амфибии,
– объём погруженной части амфибии, ![]() – площадь погружения,
– площадь погружения, ![]() – ширина корпуса амфибии.
– ширина корпуса амфибии.
Дифференциальные уравнения движения имеют вид:
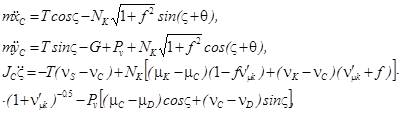 (1)
(1)
где угол ![]() .
.
Наиболее трудным режимом представляется преодоление препятствия без начальной скорости, когда корпус амфибии проходит через ряд последовательных положений статического равновесия. Такой подход обеспечивает запас в результатах расчета, так как из-за начальной скорости машина обладает кинетической энергией, что облегчает преодоление ступеньки. Для этого случая система уравнений (1) сводится к трансцендентному уравнению (2) относительно угла![]() .
.
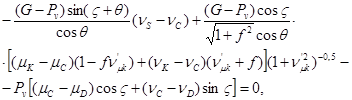 (2)
(2)
где выталкивающая сила 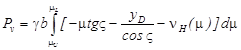 .
.
В качестве основных критериев проходимости амфибии были приняты следующие.
1. Максимальное значение силы тяги Tmax, необходимое в процессе выхода из воды на лёд.
2. Работа силы тяги, необходимая для преодоления ступеньки.
Развиваемая сила тяги ![]() определяется мощностью двигателя, размерами, скоростью вращения и характеристиками аэродинамического движителя. Для преодоления ступеньки должно выполняться неравенство
определяется мощностью двигателя, размерами, скоростью вращения и характеристиками аэродинамического движителя. Для преодоления ступеньки должно выполняться неравенство ![]() .
.
Работа, необходимая для выхода на лед, определяется соотношением:
 .
.
Значение работы, совершаемой силой тяги, должна превышать значение работы, требуемой для преодоления ступеньки ![]() .
.
Результаты исследования и их обсуждение
Рассмотрим случай преодоления амфибией ступеньки льда при следующих исходных данных: масса амфибии ![]() , длина
, длина ![]() , ширина
, ширина ![]() , координаты точек
, координаты точек ![]() ;
; ![]() ;
; ![]() ; высота ступеньки льда
; высота ступеньки льда ![]() ; уравнение контура на первом участке прямая
; уравнение контура на первом участке прямая ![]() , на втором участке
, на втором участке ![]() (окружность радиуса
(окружность радиуса![]() ).
).
Результаты расчета представлены на рисунке 3.
Обращает на себя внимание, что сила тяги, необходимая для преодоления ступеньки, имеет резко выраженный скачкообразный характер, а остальные величины, за исключением работы выхода, также не отличаются плавностью изменения. Поэтому исследования проводились в направлении сглаживания этих зависимостей.
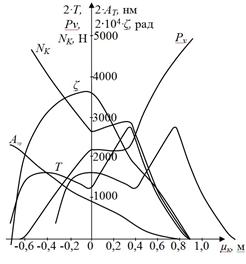
Рис. 3. Графики зависимостей сил – ![]() ,
,![]() ,
, ![]() , угла тангажа
, угла тангажа ![]() и работы
и работы ![]() от положения точки K на корпусе амфибии.
от положения точки K на корпусе амфибии.
На стадии проектирования и экспериментальной доработки велись также поиски оптимального продольного профиля конструкции амфибии, отрабатывались другие конструктивные параметры. В результате удалось добиться плавного изменения требуемой силы тяги и уменьшить ее максимальное значение в 1,67 раза. Было достигнуто «сглаживание» остальных кривых.
Выводы
1. Проведенные расчеты показали, что рабочие характеристики и параметры амфибийной транспортной машины с аэродинамическим движителем «Каспий-2» в отношении к наиболее сложному режиму эксплуатации – процессу выхода из воды на лед – не являются оптимальными.
2. Обращает на себя внимание наличие ярко выраженного (пикообразного) экстремума на графике силы T, необходимой для обеспечения преодоления препятствия в виде ступеньки льда (рис. 3).
3. Оптимальным вариантом направления дальнейших исследований является проведение исследований по совершенствованию конструкции амфибийной транспортной машины с аэродинамическим движителем «Каспий-2», цель которых состоит в «сглаживании» имеющегося «пика» за счет изменения параметров, определяющих значения силы T.
4. Основные резервы по улучшению рабочих характеристик и параметров амфибийной транспортной машины с аэродинамическим движителем «Каспий-2» следует искать в направлении оптимизации продольного профиля корпуса машины, особенно ее носовой части, а также расположения центра тяжести в сочетании с весовыми характеристиками, высоты крепления винта.
Поволжский государственный технологический университет продолжает работы по совершенствованию амфибий «Каспий-2».
Рецензенты:
Полянин Игорь Александрович, доктор технических наук, профессор, заведующий кафедрой транспортно-технологических машин, ФГБОУ ВПО «Поволжский государственный технологический университет», Министерство образования и науки Российской Федерации, г. Йошкар-Ола.
Наводнов Владимир Григорьевич, доктор технических наук, профессор, заведующий кафедрой прикладной математики и информационных технологий, ФГБОУ ВПО «Поволжский государственный технологический университет», Министерство образования и науки Российской Федерации, г. Йошкар-Ола.