



В настоящее время системы САПР дают не только возможность разрабатывать конструкторскую документацию, но и производить инженерные расчеты над создаваемыми твердотельными моделями. Это позволяет еще на стадии проектирования разрешить многие вопросы, касающиеся взаимного расположения и взаимодействия частей механизма, их силовой нагруженности и прочностных характеристик.
Приведем пример использования системы твердотельного моделирования SolidWorks и интегрированного с ней пакета инженерных расчетов COSMOS [1] для решения конкретной задачи по обоснованию конструктивных параметров комбинированного рабочего органа [2], работающего в условиях лесных вырубок.
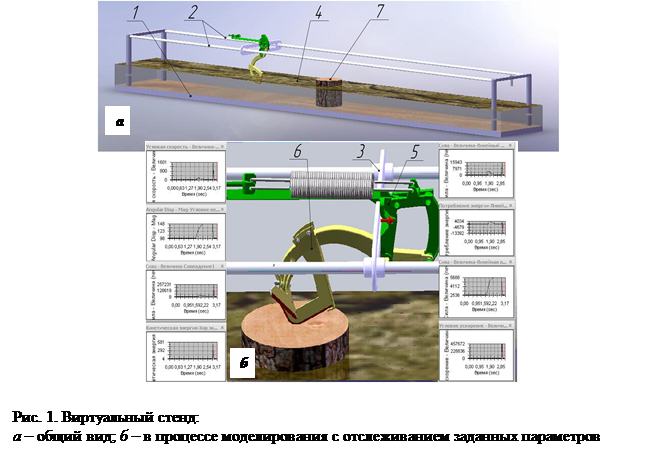 С целью изучения вопросов динамической нагруженности, кинематики преодоления препятствий, динамики движения и прочностного анализа были созданы твердотельные модели двух рабочих органов и виртуальный стенд (рис. 1) для анализа в приложении COSMOSMotion. Стенд состоит из основания 1, двух цилиндрических направляющих 2, каретки 3 и условно обозначенной земли 4. На каретке, имеющей возможность прямолинейного движения без трения, закреплялась секция 5 культиватора КРТ-3 со стандартным и экспериментальным 6 рабочими органами. В основании устанавливался пень 7 с различным боковым смещением.
С целью изучения вопросов динамической нагруженности, кинематики преодоления препятствий, динамики движения и прочностного анализа были созданы твердотельные модели двух рабочих органов и виртуальный стенд (рис. 1) для анализа в приложении COSMOSMotion. Стенд состоит из основания 1, двух цилиндрических направляющих 2, каретки 3 и условно обозначенной земли 4. На каретке, имеющей возможность прямолинейного движения без трения, закреплялась секция 5 культиватора КРТ-3 со стандартным и экспериментальным 6 рабочими органами. В основании устанавливался пень 7 с различным боковым смещением.
Проведенный кинематический и динамический анализ позволил установить такие параметры, как угловые перемещения, скорости, ускорения, моменты инерции, импульсы, кинетические энергии рабочих органов и звеньев предохранительного механизма, силы, возникающие в пружинах при различных вариантах взаимодействия с пнем.
Рассмотрим динамику изменения силы, создаваемой пружинами, так как она характеризует нагруженность рабочего органа и механизма в целом. На рисунке 2 представлены графики, показывающие динамику изменения усилий пружин при варьировании типа рабочего органа и высоты пня.
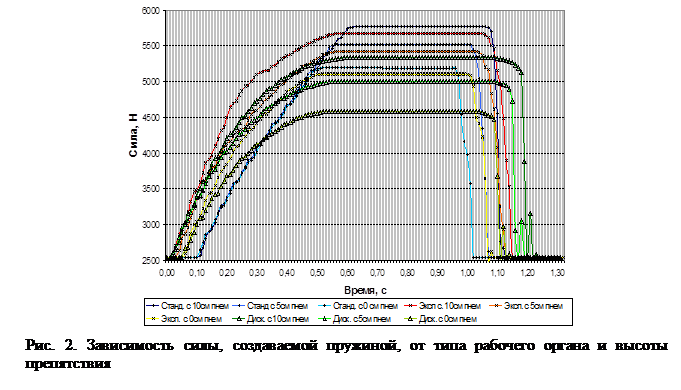 Серийный рабочий орган при высоте пня 10 см имеет наибольшее усилие на пружине предохранительного механизма, равное 5770 Н, экспериментальный рабочий орган – несколько меньшее, равное 5679 Н, а дисковый – минимальное, составляющее 5346 Н. Аналогичные тенденции прослеживаются и при других высотах пня.
Серийный рабочий орган при высоте пня 10 см имеет наибольшее усилие на пружине предохранительного механизма, равное 5770 Н, экспериментальный рабочий орган – несколько меньшее, равное 5679 Н, а дисковый – минимальное, составляющее 5346 Н. Аналогичные тенденции прослеживаются и при других высотах пня.
Динамика въезда на препятствие у экспериментального рабочего органа схожа с серийным, однако при сходе с пня наблюдается небольшое увеличение силы удара за счет несколько большей массы до 15009 Н, что на 22% больше, чем у серийного рабочего органа (12320 Н). При этом массивный дисковый рабочий орган, например как у широко распространенного лесохозяйственного культиватора КЛБ-1,7, при сходе с пня испытывает нагрузку, по разным данным, от 40 000 до 100 000 Н [4]. Очевидно, что использование комбинированного рабочего органа позволяет значительно снизить ударные нагрузки в сравнении c дисковым рабочим органом.
Таким образом, конструкция экспериментального комбинированного рабочего органа и предохранительного механизма позволяет преодолевать препятствия в виде пней с различным их боковым смещением и высотой. Причем при фронтальном взаимодействии с препятствием экспериментальный рабочий орган имеет силовую характеристику, схожую с дисковым рабочим органом, а при боковом взаимодействии совпадающую с серийным рабочим органом. То есть можно говорить о получении такой комбинации свойств, которая позволяет работать в условиях вырубок. Установленные силовые параметры процесса преодоления пня послужили основой для проведения прочностных расчетов.
Анализ проводился средствами приложения COSMOSWorks, тип анализа – статический, величина прикладываемой тестирующей силы – 1000 Н, наложенные ограничения – зафиксированная грань верхнего отверстия стойки и закрепление на цилиндрическом неподвижном шарнире нижнего отверстия.
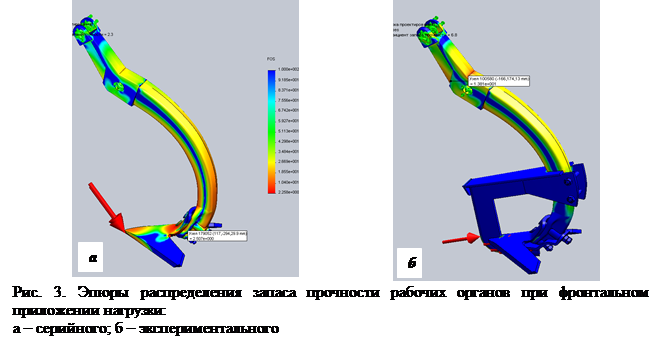
Были рассмотрены различные варианты взаимодействия рабочих органов с пнем и выявлена область с минимальным запасом прочности – место соединения крыльев стрельчатой лапы и груди (обозначены маркером). При фронтальном варианте взаимодействия (рис. 3) запас прочности в этом месте составляет у серийного рабочего органа всего 2,51. Экспериментальный, напротив, при полной разгрузке лапы и незначительных усилиях на черенковом ноже распределяет нагрузку по верхней части стойки, причем минимум запаса прочности составляет 13,81. Очевидно, что работоспособность стандартного рабочего органа в условиях наличия непреодолимых препятствий не обеспечивается его конструкцией, в то время как серийный рабочий орган обладает приемлемым запасом прочности.
Другой рассматриваемый вариант взаимодействия – это встреча края крыла лапы с препятствием, при котором вероятность достижения критического напряжения возникает уже при нагрузке в 2930 Н у стандартного и 2550 Н у экспериментального рабочего органа.
Эти значения меньше максимального расчетного значения силы, которое составляет 1954 Н при переезде через 10-сантиметровый пень. Однако для повышения надежности все же необходимо увеличить запас прочности стрельчатой лапы.
С этой целью была создана твердотельная модель рабочего органа с увеличенной шириной основания крыла. Такое незначительное изменение формы позволило увеличить запас прочности до 3,77, что на 48% больше начального. Изменение ширины и формы стрельчатой лапы практически не влияло на распределение запаса прочности в стойке и черенковом ноже, который был во всех случаях более 10.
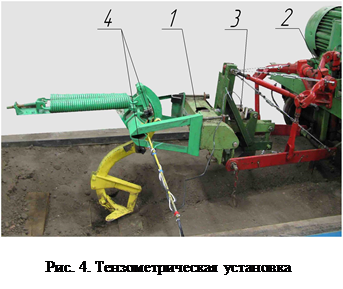
С целью подтверждения полученных данных была проведена экспериментальная проверка. Для этого применялась тензометрическая установка 1, установленная на тяговой тележке 2 (рис. 4). Тяговое сопротивление фиксировалось при помощи тензозвена 3, а углы поворота предохранительного механизма – датчиками угла поворота 4. Полученные электрические сигналы подавались на модули ADAM и далее обрабатывались ЭВМ посредством приложения GeniDAQ.
 Для сравнения был выбран угол поворота стойки рабочего органа, так как этот параметр напрямую фиксировался датчиком угла поворота. На рисунке 5а представлены графики, демонстрирующие динамику изменения угла поворота при переезде экспериментального рабочего органа через пень высотой 10 см, при номинальной глубине обработки 12 см, полученные экспериментальным и теоретическим путем
Для сравнения был выбран угол поворота стойки рабочего органа, так как этот параметр напрямую фиксировался датчиком угла поворота. На рисунке 5а представлены графики, демонстрирующие динамику изменения угла поворота при переезде экспериментального рабочего органа через пень высотой 10 см, при номинальной глубине обработки 12 см, полученные экспериментальным и теоретическим путем
Анализ графиков показывает достаточно высокую степень достоверности теоретических данных. Единственным заметным отличием экспериментальных данных является ступенчатый характер роста угла, что объясняется колебаниями тензометрической навески и наличием зазоров в предохранительном механизме.
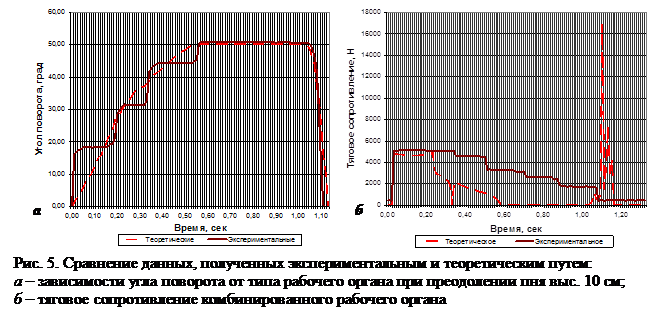 Проверка достоверности силовых параметров проводилась сравнением тягового сопротивления и силы на виртуальном двигателе (рис. 5б). Расхождения по максимальным значениям при въезде на пень для экспериментального рабочего органа составляют 3,9%. При дальнейшем движении по поверхности пня расхождения несколько увеличиваются, хотя также наблюдается снижение тягового сопротивления.
Проверка достоверности силовых параметров проводилась сравнением тягового сопротивления и силы на виртуальном двигателе (рис. 5б). Расхождения по максимальным значениям при въезде на пень для экспериментального рабочего органа составляют 3,9%. При дальнейшем движении по поверхности пня расхождения несколько увеличиваются, хотя также наблюдается снижение тягового сопротивления.
Расхождения данных, вероятно, возникли из-за того, что в модели был использован твердый пень, исключающий врезание и заклинивание режущих кромок рабочих органов. Таким образом, полученные теоретическим путем ударные нагрузки в момент падения рабочего органа могут быть приняты с достаточной степенью точности. Это особенно важно, потому что в силу конструкции тензонавески, характеристик используемой регистрирующей аппаратуры и наличия эффекта демпфирования почвенной средой невозможно фиксирование данного параметра.
Выводы. Использование CAD-систем с интегрированными в них САЕ-приложениями позволяет еще на стадии проектирования быстро провести наглядные виртуальные исследования с достаточно высокой степенью достоверности, что значительно снижает вероятность допущения ошибок, которые в противном случае могли проявиться только на стадии изготовления и испытания опытных образцов.
Рецензенты:
Афоничев Дмитрий Николаевич, заведующий кафедрой электротехники и автоматики, профессор Воронежского государственного аграрного университета императора Петра I, доктор технических наук, г. Воронеж.
Попиков Петр Иванович, д.т.н., профессор кафедры механизации лесного хозяйства Воронежской государственной лесотехнической академии, г. Воронеж.