



Введение
При расследовании причин ДТП наиболее важным вопросом является установление скорости автомобиля перед столкновением с другим транспортным средством. Как правило, в ходе предварительного следствия, для ее определения используют показания свидетелей, потерпевших либо обвиняемых в данном ДТП. Но как показывает практика, полученные показания не всегда достоверны и имеют значительный разброс. Это обусловлено тем, что, с одной стороны, каждый наблюдатель склонен либо к переоценке скорости, либо к ее недооценке, а с другой – рассеянием индивидуальной оценки вокруг ее среднего значения [3].
Анализ методов определения
Более объективный результат, при определении скорости автомобиля перед столкновением, можно получить лишь при оценке последствий ДТП (следы торможения, положение автомобилей, деформация кузова). В настоящее время разработан ряд методик, позволяющих установить с той или иной погрешностью скорость автомобиля перед столкновением.
Так методика, описанная в литературе [3,4], базируется на анализе следов торможения (юза), зафиксированных на дорожном покрытии, на месте ДТП. Если при экстренном торможении колеса транспортного средства доводятся до блокировки, его скорость перед началом торможения определяется по формуле [3]:
![]() , (1)
, (1)
где Va – искомая скорость движения, м/c;
t3 – время нарастания замедления при экстренном торможении, с;
j – установившееся максимальное замедление, м/с2;
Sю – длина следа юза колеса до полной остановки транспортного средства, м.
При выводе этой формулы исходили из условия, что длина следа торможения равна расстоянию, на которое перемещается транспортное средство в процессе торможения его с максимальным замедлением.
Величина установившегося максимального замедления j определяется экспериментальным или расчетным путем с учетом обстоятельства происшествия [4].
Данный способ определения скорости автомобиля перед столкновением имеет ряд существенных недостатков, таких как:
- на влажных покрытиях следы юза обычно мало заметны, а на обледенелой и укатанной заснеженной дороге могут быть не видны совсем. Кроме того, частицы резины протектора, образующие следы юза на покрытии, с течением времени выветриваются или смываются, вследствие чего длина следа уменьшается;
- не учитывается гашение скорости автомобиля при столкновении с другим транспортным средством.
Данная методика определения скорости автомобиля эффективна лишь в случае нахождения автомобиля в конце тормозного следа, длина которого замеряется до задних колес. Такое положение автомобиля характерно для случая наезда на пешехода.
В случае столкновения автомобилей наибольшее распространение в экспертной практике получили методики по определению скорости, основанные на положениях теории удара [1,2,3]. В результате столкновения автомобилей кинетическая энергия удара гасится за очень короткое время и на небольшом расстоянии. Это вызывает появление ускорений и пропорциональных им ударных сил значительной величины. Практически возникают силы, составляющие для легковых автомобилей от нескольких десятков до 400 кН. Для автобусов и грузовых автомобилей эти силы могут возрастать до нескольких тысяч кН.
В теории удара используется понятие коэффициента восстановления Куд – величины, характеризующей потери механической энергии соударяющихся тел вследствие появления в них остаточных деформаций и их нагревания. При прямом ударе тел коэффициент восстановления представляет собой отношение относительных скоростей тел перед ударом и после него [3]:
![]() , (2)
, (2)
где v1 и v2 – скорости тел до удара, м/с;
v1’ и v2’ – скорости тех же тел после удара, м/с.
Если коэффициенты соударяющихся тел равны, то, зная скорости после v1’ и v2’ удара, можно найти начальные значения скоростей [3]:
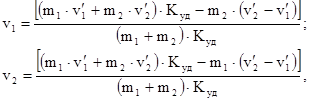 (3)
(3)
где m1 и m2 – массы соударяющихся тел, кг;
Куд – коэффициента восстановления.
Для определения скорости автомобилей до столкновения по формуле (3) необходимо знать величину коэффициента восстановления для соударяющихся автомобилей, достоверных данных о значении которого весьма немного. Непосредственное использование теории удара в экспертизе ДТП малоэффективно по ряду причин, таких как:
- практически невозможно установить значения коэффициента восстановления расчетным путем;
- в теории рассматривается столкновение тел простых форм, автомобили же представляют собой сложные механические системы, имеющие различные очертания и механические свойства;
- в теории контакт тел рассматривается в точке, на практике же автомобили взаимодействуют на обширных участках и.т.п.
В [3] описывается методика определения скоростей автомобилей при их столкновении, основанная на определении работ сил сопротивления перемещениям автомобилей в процессе их отбрасывания после столкновения. Согласно [3], начальные скорости автомобилей 1 и 2 при перекрестном столкновении можно определить, предположив, что кинетическая энергия каждого автомобиля после удара перешла в работу трения шин по дороге во время поступательного перемещения на расстояние Sпн1 (Sпн2) и поворота вокруг центра тяжести на угол ?1 (?2).
Работа трения шин по дороге при поступательном перемещении автомобиля 1:
![]() , (4)
, (4)
где m1 – масса автомобиля 1, кг;
Sпн1 – расстояние, пройденное автомобилем 1 после удара, м;
φy – коэффициент поперечного сцепления шин с дорогой.
То же при повороте автомобиля 1 относительно его центра тяжести на угол ?1:
![]() , (5)
, (5)
где a1 и b1 – расстояние от переднего и заднего мостов автомобиля 1 до его центра тяжести, м;
?1 – угол поворота автомобиля 1 вокруг его центра тяжести, рад;
Rz1 и Rz2– нормальные реакции дороги, действующие на передний и задний мосты автомобиля 1и определяемые, как:
![]() , (6)
, (6)
где L’ – база автомобиля 1, м.
Следовательно: 
Откуда скорость автомобиля 1 после столкновения:
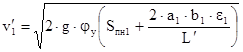 (7)
(7)
Аналогично определяется скорость автомобиля 2 после столкновения:
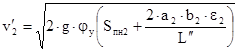 , (8)
, (8)
где Sпн2 – расстояние, пройденное автомобилем 2 после удара, м;
a2 и b2 – расстояние от переднего и заднего мостов автомобиля 2 до его центра тяжести, м;
?2 – угол поворота автомобиля 2 вокруг его центра тяжести, рад;
L’’ – база автомобиля 2, м.
Скорости автомобилей 1 и 2 до перекрестного столкновения окончательно определяются из закона сохранения количества движения с учетом формул (7), (8):
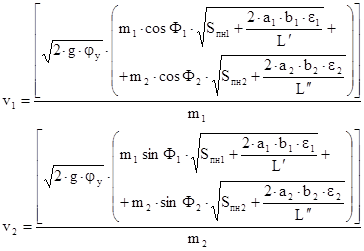 , (9)
, (9)
где Sпн1, Sпн2,– расстояния, на которые переместились центры тяжести автомобилей 1 и 2 соответственно после перекрестного столкновения, м;
Ф1, Ф2 – углы, на которые переместились центры тяжести автомобилей 1 и 2 соответственно после перекрестного столкновения, рад.
При использовании данной методики необходимо учитывать, что расстояния Sпн1 и Sпн2 и углы Ф1и Ф2, характеризующие перемещения центров тяжести автомобиля, могут значительно отличаться от длины и углов наклона следов, оставленных шинами на дороге.
Для более точного установления скорости автомобиля перед столкновением необходимо знать, какая часть его кинетической энергии, высвобождаемой при ударе с другим транспортным средством, вызывает механические повреждения и переходит в потенциальную энергию пластического деформирования кузова автомобиля. Методика оценки объема деформации кузова легковых автомобилей, изложенная в литературе [1,2], основана на алгоритме Crash 3[1,2,5] и предназначена для определения доли затрат кинетической энергии ΔE на развитие деформаций и эквивалентную данным затратам скорость. Данная методика используется в таких специализированных продуктах, как: Crash 3, PC Crush 7.2, Big Sums Pro, Damage, AR pro 7 и других подобных. Согласно [1,2], кинетическая энергия, затраченная на развитие деформации (на примере 2-х характерных точек зоны локализации деформаций), определяется, как:
 , (10)
, (10)
где δ – угол столкновения транспортных средств, град;
LД – ширина зоны локализации деформаций, мм;
mА – масса автомобиля, кг;
k0 – коэффициент жесткости (квадратичная постоянная), определяемый по результатам краш-тестов [2,5];
k1 – коэффициент жесткости, определяемый по результатам краш-тестов [2,5];
С1, С2 – величина деформации в характерной точке, определяемая линейной съемкой объемных деформаций транспортных средств, мм.
Методика определения данных деформаций подробно описана в [1,2].
Скорости автомобилей 1 и 2 перед столкновением, в простейшем случае, определяются как слагаемое из следующих составляющих: скорости погашенной при развитии локальной зоны деформации автомобиля при ударе – ΔVcrush, и скорости автомобиля, к моменту столкновения исходя из пути их отбрасывания – VOT [1,2]:
![]() (11)
(11)
Скорости автомобилей 1 и 2 к моменту их столкновения можно получить из закона сохранения энергии:
 , (12)
, (12)
где α1 и α2 – углы отбрасывания автомобилей 1 и 2 соответственно, град;
v1’ и v2’ – скорости после столкновения автомобилей 1 и 2 соответственно, км/час.
Поскольку расход энергии на перемещение автомобилей 1 и 2 после ДТП незначителен, то их скорости после столкновения можно определить исходя из энергетических затрат перемещения центра масс автомобиля после наезда на препятствие [1,2]:
 , (13)
, (13)
где S1 и S2 – расстояние, пройденное автомобилем 1 и 2 после удара, м;
φ’ – коэффициент поперечного сцепления шин с дорогой.
Скорость ![]() , затраченная на развитие локальной зоны деформации автомобиля после столкновения определяется по полученному значению кинетической энергии ΔE (10) [1,2]:
, затраченная на развитие локальной зоны деформации автомобиля после столкновения определяется по полученному значению кинетической энергии ΔE (10) [1,2]:
 , (14)
, (14)
где mА – масса автомобиля, кг.
Таким образом, можно получить оценочную скорость движения автомобиля до столкновения с другим транспортным средством с учетом полученных им деформаций в результате ДТП.
Недостатком данного метода является отсутствие возможности учесть ряд факторов, существенно влияющих на деформации, полученные автомобилем в результате столкновения. К таким факторам можно отнести техническое состояние автомобиля на момент столкновения, особенности конструкции кузова, состояние тормозной системы, срок службы автомобиля и.т.п. Таким образом, данный метод определения скорости автомобиля перед столкновением требует дальнейшей проработки, с целью включения неучтенных исходных данных, значительно влияющих на конечный результат расчета.
Заключение
Рассмотренные в статье методы определения скорости автомобиля до столкновения, к сожалению, не позволяют получить абсолютно достоверную информацию о исходной скорости движения. Погрешности вычисления, в свою очередь, приводят к недостоверной картине произошедшего ДТП.
В настоящее время на мировом рынке программного обеспечения существует достаточно много различного рода программных средств, применяемых при анализе ДТП и позволяющих определить также и скорость автомобиля перед столкновением. К сожалению, в России они практически не известны. Однако роль специализированного программного обеспечения в экспертных исследованиях при реконструкции ДТП неоценима, а активное развитие и совершенствование делает многие программные комплексы мощным инструментом эксперта [1,2].
Рецензенты:
Бардышев О.А., д.т.н., профессор, генеральный директор ЗАО «Санкт-Петербургская техническая экспертная компания», г. Санкт-Петербург.
Ушаков А.И., д.т.н., профессор, директор ООО «Научно-производственный информационно-консультационный центр-плюс», г. Санкт-Петербург.
Библиографическая ссылка
Виноградова Т.В., Кулида Ю.В. КРАТКИЙ ОБЗОР НЕКОТОРЫХ СУЩЕСТВУЮЩИХ МЕТОДОВ ОПРЕДЕЛЕНИЯ СКОРОСТИ АВТОМОБИЛЯ ПЕРЕД СТОЛКНОВЕНИЕМ // Современные проблемы науки и образования. 2013. № 6. ;URL: https://science-education.ru/ru/article/view?id=11606 (дата обращения: 01.05.2026).