



В настоящее время РКК «Энергия» разрабатывает новый спускаемый космический аппарат с улучшенными аэродинамическими характеристиками, чем у используемого сейчас для возвращения космонавтов с орбиты СА «Союз». Управление посадкой нового корабля будет производиться с помощью специального органа управления - балансировочного щитка (рисунок 1 - trim flap). Отклоняясь на заданную величину, щиток создает необходимый момент тангажа mz, который обеспечивает программный угол атаки по траектории движения аппарата. Эффективность балансировочного щитка, то есть максимальный создаваемый им момент, зависит от его длины. Можно было бы взять и заведомо большой аэродинамический щиток, но от его размеров зависит мощность отклоняющего привода, а значит размер и масса. Поэтому необходимо выбрать оптимальную длину балансировочного щитка, а для этого нужно изучить зависимость характеристик аппарата от конфигурации этого органа управления.
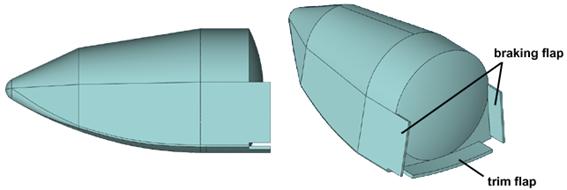
Рис. 1. Общий вид возвращаемого спускаемого аппарата типа «несущий корпус»
Исследовалась модель аппарата, имеющего длину 6 метров. Все результаты в работе получены методом численного моделирования обтекания тела на различных углах атаки при соответствующих числах Маха. Для расчета параметров потока использовался программный комплекс FlowVision.
Для начала была оценена применимость выбранного метода для решения поставленной задачи. Ранее в ЦАГИ и ЦНИИМаш были проведены эксперименты по обдувке модели аппарата типа «несущий корпус». Необходимо было численно воспроизвести эксперимент и сравнить полученные расчетные и экспериментальные данные. Результаты эксперимента и расчета сравнивались для модели в следующей компоновке: короткий, 0.5 метра в размерности изделия, неотклоненный балансировочный щиток, тормозные щитки отсутствовали. При этом в расчете были соблюдены все условия эксперимента. Отметим, что в эксперименте экстраполяцией величин давления по днищу учитывалась площадь, закрытая державкой, и в расчете эта площадь была учтена усреднением давления по части днища в области державки. Исследование проводилось для чисел Маха 0.6 и 4.0 (дозвук и гиперзвук) и для углов атаки от 0° до 40°. В результате графики расчетных зависимостей аэродинамических коэффициентов cxa, cya (коэффициенты сопротивления и подъемной силы в поточной системе координат) и mz (коэффициент момента тангажа) от угла атаки очень хорошо совпали с экспериментальными графиками. Максимальное расхождение численных и экспериментальных данных составило 3% по cxa и cya и 6% по mz - на Махе 0.6, и менее 1% по всем характеристикам - на Махе 4.0. Таким образом, можно сделать вывод, что предложенный численный метод можно использовать для оценки с достаточной степенью точности интегральных характеристик спускаемого аппарата типа «несущий корпус» с неотклоненным балансировочным щитком.
Попутно в работе исследовалось влияние подвесных устройств на полученные в эксперименте данные. Для этого был проведен расчет, отличающийся от предыдущего отсутствием державки аппарата, которая использовалась при обдувке в аэродинамической трубе. Как и в расчете выше, варьировался угол атаки, в результате были получены «чистые» характеристики аппарата, т.е. без влияния подвесных устройств, в зависимости от угла атаки корабля. Выяснилось, что наличие державки особенно сильно сказывается на результатах расчета, а значит, исходя из предыдущего, и на результатах эксперимента, на дозвуковой скорости. Подвесные устройства расположены в эксперименте сзади модели, чтобы не влиять на обтекающий тело поток, и на дозвуке державка вносит сильное перераспределение давления в области днища аппарата. Особенностью исследуемого корабля является то, что донное давление на всех скоростях оказывается меньше атмосферного, и, таким образом, основное сопротивление ложится на донную область. Наличие державки повышает давление в области днища, уменьшая коэффициент сопротивления cx на дозвуке. На гиперзвуке (число Маха 4.0), как выяснилось, влияние подвесных устройств отсутствует. Графики основных аэродинамических характеристик, полученные в расчетах с державкой и без нее на этом числе Маха, наложились друг на друга.
Далее, для оценки эффективности органа управления, необходимо было провести также расчет с отклоненным балансировочным щитком. Исследовались следующие конфигурации аппарата: отклоненный на 20° щиток длиной 0.5, 0.9 и 1.0 метра в размерности изделия. Как прежде, брались числа Маха 0.6 и 4.0, углы атаки от 0° до 40° с шагом 10°.
Кроме описанных выше весовых испытаний, в ЦНИИМаш был проведен также дренажный эксперимент по определению эффективности балансировочного щитка. Щиток в эксперименте имел длину 0.9 метра, был отклонен на 20°, число Маха равно 4.0, углы атаки 10° и 20°. Датчики давления были расположены на внешней (наветренной) и внутренней (подветренной) сторонах щитка, а также на днище и по верхней части центральной образующей аппарата. В результате было получено заметное расхождение расчетных и экспериментальных величин для точек на внешней стороне щитка. Остальные же точки в расчете дали хорошее соответствие экспериментальным данным. Для того чтобы проверить достоверность данных FlowVision, а также понять причину расхождения полученных результатов именно на отклоненном балансировочном щитке, был проведен такой же численный эксперимент с помощью программного комплекса AeroShape. Неявная разностная схема, которую применяет FlowVision, абсолютно устойчива на любых скоростях. Программа AeroShape, в отличие от FlowVision, использует явную разностную схему, которая на больших сверхзвуковых скоростях также является абсолютно устойчивой. На рисунке 2 приведено сравнение полученных численными методами графиков распределения давления по нижней части центральной образующей аппарата.
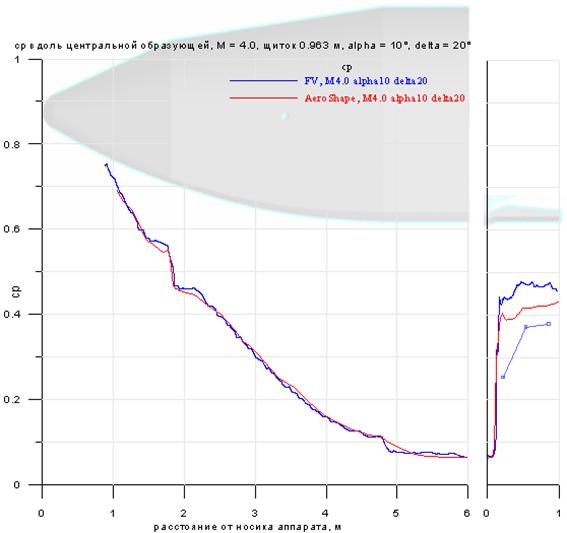
Рис. 2. M = 4.0 угол атаки 10°, угол отклонения щитка 20°, сравнительные графики распределения давления по нижней части центральной образующей корпуса аппарата, FlowVision и AeroShape. Точки - экспериментальные данные. Давление на щитке показано вдоль прямой, параллельной плоскости щитка
На рисунке видно, что значения коэффициента давления на отклоненной части щитка для двух программ отличаются, AeroShape ближе, но, тем не менее, все равно оказался далек от эксперимента. И самое главное, провал в величине давления в начале щитка, который имеет место в эксперименте, не был смоделирован, даже качественно, ни одной программой. Экспериментальные и расчетные данные сравнивались и в других точках внешней стороны щитка, везде наблюдалась одинаковая картина - провал в уровне давления в начале щитка и отклонение на одинаковую величину от эксперимента в других точках на щитке.
Здесь необходимо разобраться в сущности имеющего место физического явления. Набегающий поток создает около тела тонкий пограничный слой. Нижняя часть аппарата имеет сферическую форму, и на высокой скорости на положительном угле атаки в реальном эксперименте происходит накопление пограничного слоя. При прохождении косого скачка уплотнения, накопленный погранслой создает зону пониженного давления в начале щитка, и далее, смешиваясь с обтекающим щиток потоком, понижает общий уровень давления на щитке. Подобное явление образования зоны разрежения в начале отклоненного щитка не ново и хорошо известно в авиации и самолетостроении. Программы же оказались не способны смоделировать это физическое явление, и понятно почему. Комплекс FlowVision использует метод подсеточного разрешения геометрии, в соответствии с которым и с учетом условия прилипания вычисляется касательная составляющая скорости жидкости вблизи стенки. Очевидно, используя этот метод, FlowVision моделирует пограничный слой отдельно в каждой ячейке сетки, но при этом теряется суммарное влияние всех пристеночных ячеек на пограничный слой. Смоделировать накопление погранслоя программа оказалась не в состоянии. Комплекс AeroShape, судя по всему, действует аналогичным образом. Таким образом, можно сделать вывод, что численное моделирование упускает из виду важное физическое явление в расчете интегральных характеристик корабля с отклоненным балансировочным щитком. Программа завышает эффективность отклоненного щитка, этот фактор необходимо учитывать при проектировании органов управления возвращаемого спускаемого аппарата типа «несущий корпус». Для числа Маха 0.6 подобные оценки сделать трудно, т.к. нет экспериментальных данных для отклоненного балансировочного щитка.
Далее в работе исследовано влияние длины балансировочного щитка на интегральные характеристики корабля. Построены графики разности аэродинамических коэффициентов cx, cy и mz отклоненного на 20° и неотклоненного щитка в зависимости от длины щитка для различных углов атаки (графические данные в статье не приведены, т.к. РКК «Энергия» не разглашает характеристики нового корабля). Т.к. выше было установлено, что для отклоненного щитка программа завышает эффективность органа управления, сделана соответствующая поправка для каждого угла атаки отдельно (напомню, экспериментальные данные интегральных характеристик аппарата с отклоненным на 20° и с неотклоненным щитком есть для всего диапазона углов атаки 0° - 40°). При внесении поправки считалось, что на величину зоны разрежения длина отклоненного щитка не влияет. Построенные зависимости dcx, dcy и dmz от длины щитка описывают эффективность органа управления, и по ним, исходя из требований, предъявляемых системой управления к аэродинамическим характеристикам в процессе движения корабля, можно будет выбрать соответствующий размер аэродинамического балансировочного щитка.
Заключение
Исследовано влияние подвесных устройств, используемых в эксперименте, на аэродинамические характеристики СА типа «несущий корпус». Показано, что метод численного моделирования на гиперзвуке завышает эффективность органов управления по сравнению с реальными данными. Построена зависимость эффективности балансировочного щитка в зависимости от его длины методом численного моделирования с учетом поправки на физику процесса.
СПИСОК ЛИТЕРАТУРЫ:
- 1. Афанасьев И.Б., Батурин Ю.М., Белозерский А.Г. Мировая пилотируемая космонавтика. История. Техника. Люди. // М.: РТСофт, 2005. С. 3-747.
- 2. Лойцянский Л.Г. Механика жидкости и газа. // М.: Гос. из-во физ.-мат. лит-ры, 1959. С. 3-784.
- 3. Wilcox D.C. Turbulence modeling for CFD. // DCW Industries, Inc., 1994. P. 5-477.
Библиографическая ссылка
Сурнин Д.А ИССЛЕДОВАНИЕ ВЛИЯНИЯ РАЗЛИЧНОЙ КОНФИГУРАЦИИ ОРГАНОВ УПРАВЛЕНИЯ НА АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВОЗВРАЩАЕМОГО СПУСКАЕМОГО АППАРАТА ТИПА «НЕСУЩИЙ КОРПУС» // Современные проблемы науки и образования. 2007. № 6-1. ;URL: https://science-education.ru/ru/article/view?id=752 (дата обращения: 23.06.2026).